I’ll get back to Transient Response real soon, but in the meantime let’s discuss that all too common and commonly disdained autocross feature called the Pinchy Entry. Turns out, pinched entries to corners are one of those places where fast transient response and low yaw inertia play a key role in Saving Time.
Let’s start by assuming a standard 90 degree corner on a road course, as shown in Figure 1, where our entry speed is much faster than the corner can be taken. We must find our braking and turn in points and most of us know that we should trail-brake to the apex to produce an Euler spiral entry path. We spiral in and then beyond the apex we accelerate and naturally spiral out. The track edges are the “ideal” directions in Adam Brouillard terms and we are maximizing the car’s acceleration backwards along the entry edge up to the apex and maximizing the car’s acceleration forward along the track edge beyond the apex. No issues, right? We all got this? (If not, go read Brouilliard.) The approximate path is shown in thin solid black.
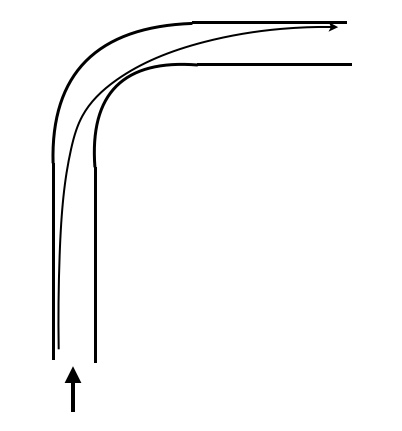
Figure 1- A Standard Road Course Corner
Now let’s replace the road course with 3 cones like we might find in an autocross, as shown in Figure 2. Has anything changed? I think it has. Or, at least, for some corners something has changed. We might take the corner exactly the same way, but most of the time it wouldn’t be correct. This is probably a key difference between road-racing and autocrossing and it is caused by the freedom (and complications) autocrossers deal with due to the lack of track edges.
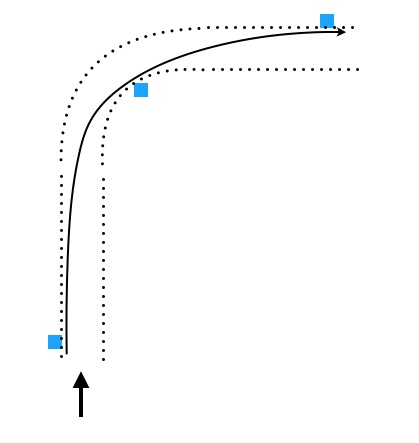
Figure 2- Autocross 3-Cone Corner
To better illustrate my future point as to why something has changed let’s move the entry cone inward to create a “pinched” entry as shown in Figure 3. We see this often in autocross courses where the entry is pinched as compared to the exit. Most of us know not to just charge down to the corner by taking the blue dotted path. If we do, we have to severely slow the car to negotiate the resulting small radius section just before the apex. Not only are we then slow to the apex, but we are then slow after the apex as well because our minimum cornering speed is reduced. I made this mistake for way too long!
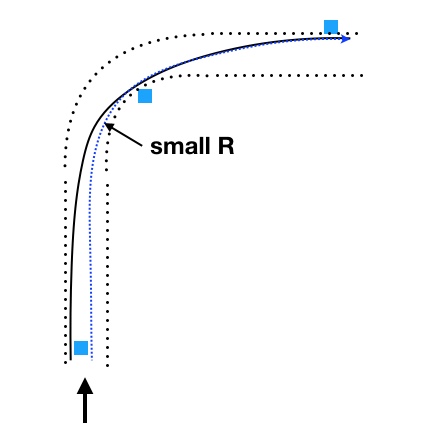
Figure 3- Pinchy Entry
Instead of taking the blue dotted line, experience leads most of us to give up just a little distance and turn left at the entry cone to get a better angle on the apex cone as shown in the red dashed line in Figure 4. We can then get out to the “original” line and therefore be able to hit the apex at the same speed and angle as before. We might have to slow a little bit as well for this “hidden” maneuver (not evident on the course map) but at least corner exit has not been compromised.
But do you see what we did? We created a chicane where there wasn’t one before. Per Brouillard’s definition a chicane is two corners of opposite direction that are so close together they cannot be optimized separately. They must be optimized together. Autocrossers are nothing if not chicane creators. Also, this “hidden” maneuver is aided and abetted mightily by a car with fast transient response and low yaw inertia.
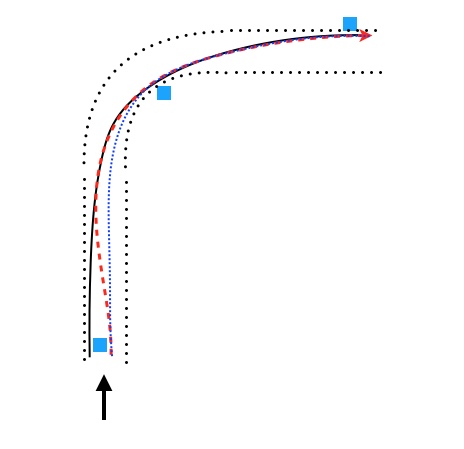
Figure 4- Creating A Chicane
But, wait a minute: this is autocross and there are no track edges, or at least there may not be much of a track edge-like limitation. Experience (and data) tells me that in many cases I should go even further out and take something like the green dashed path in Figure 5 to Save Time to the apex (by not braking as much) and increase the speed at the apex, even though I’m adding distance and having to slow a little earlier.
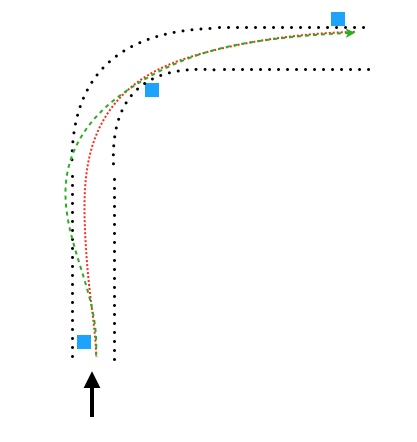
Figure 5- Exceeding Track Edges?
How far should we go to the left? Beats me. Only experience can tell us how much is best for the particular car and particular corner geometry.
