E-Street 944 I’m Developing
I’ve been thinking lately on what’s most basic and important to Saving Time on the autocross course.
First of all, we have to learn to drive at the limit. Let’s call this Skill #1.
We have to learn to be so sensitive that we can drive right at the maximum capability of the tires and hold it there, or a little below or somewhat above, depending on the need.
Want to be sensitive? You gotta relax. Nothing will impair sensitively like being stiff. Of course, being relaxed while competing is tough. There are some simple signs, like do you have your hands together near the top of the steering wheel? This all but guarantees your shoulders are bunched up, with the bones out of the sockets and you have little sensitivity in your hands. Shoulders need to be relaxed down into the sockets for good connections to the torso to allow the most sensitive control of what happens at the hands.
To hold a car right on the limit, getting every last 1/4 mph out of a sweeper, we’ve got to be sensitive and fast. By fast, I mean we must react fast and early, because a car on the limit is a high-wire balancing act, ready to do something bad (that will slow us down, usually by taking us off our line) at any second. The steering wheel may not move much, but it moves with high-frequency, if relatively small amplitude, motions. As I’ve noted elsewhere, this will produce a smoothly driven car to the outside observer but the driver may feel furiously busy on the inside.
Couple the sensitive, fast hands to steering with the right foot, in order to shift weight forward and back to adjust the line with slight understeer and oversteer and you have basic skill #1 necessary to get the most out of your tires. Right foot steering only works near the limit of tire adhesion. Below the limit the car goes where the tires point. What’s the fun in that?
Skill #1 also includes becoming comfortable with exceeding the tire’s peak capability when needed. For instance, if we need to rotate the car in a corner to exit on the power earlier, then somehow we have to induce the rear tires to take a normally inefficient, excessive slip angle. For a moment. This is why many really good drivers dislike cars that are difficult to rotate. It makes it harder for them to employ a strategy that Saves Time.
Here’s the opposite situation. I rode with a guy this weekend who had an interesting cornering technique. He would take a much too straight and tight line toward a corner, turn late and sharply around the cone, and then mash the throttle. Just past the cone the tires would break loose, the back end would step out, the rear tires would slip with acceleration and then the car would be off toward the next corner. This sort of worked, but he’s still usually last in class.
Why did it work? He runs a late-model, modern sports car with the very capable traction control and stability management on at all times. The car would oversteer a little and the rear tires would spin a little, all under the control of the computer and the car is never going to spin. He had learned to let the computer do about 50% of the turning control and all of the stability and wheel-spin management. I’d never seen anyone use the nannies to such obvious and intentional effect. Do you think he will ever become a fast driver? I don’t either. Not in this lifetime. But, he is relatively safe on a site that has a ditch on one side and poles that can be reached if you are sufficiently crazy/stupid and he’s quite certain his wife would kill him if he damaged the car.
I just tried to get him to open his line up so he didn’t have to brake so much into every turn.
Another aspect of Skill #1: I’ve heard Sam Strano teach a concept called turning at the cones. (No, he doesn’t mean wait ’till we get to the cone to start the turn!) Once I figured out what this meant and was able to do it regularly, I got faster.
I think turning at the cones means, say, when approaching and turning toward an offset gate, we aim the car at the inside cone so that the car’s path, if projected forward and around the arc at that moment, will clearly intersect with and hit the cone.
That sounds kinda stupid, I know. But, here’s the trick: We gotta speed up.
If you speed up then the slip angle of all four tires increases while cornering. The car drifts on a new, larger arc than it would have, an arc that magically passes the car just outside the cone. Without a specific steering input.
In the old days of road racing, when even race tires had huge slip angles, all the corners at race tracks were clearly taken this way. You’ve seen those old movies of races in the 1920’s up through the 1950’s with the car pointing one way but the actual path determined as much by the amount of 4-wheel drift as which way the axis of the car or the front wheels were pointing. We see this a little now in modern-day Drifting competitions, though that type of “drift” used to be more accurately termed a power slide. (They also make it very easy to observe that power sliding from corner to corner, while dramatic, creates a slow way to get around a course.) Modern day Formula 1 cars exhibit slip angles of about 0.0001 degree. They don’t appear to drift at all. This is why mere mortals can’t drive one worth a flip.
I think this drift effect accounts for the common occurrence among the moderately skilled (I include myself in this category) that it requires a slightly out of control run to be fast. It’s easier to carve an arc with a slip angle that is just below or perhaps right up to the most efficient angle for the tire, the angle of maximum lateral G. When you do that you can predict with assurance from the moment of turn-in that you will make the gate. Turning at the cones requires playing on the other side of the peak slip angle. It can be hairy out there. We have to turn-in such that, without a significant amount of 4-wheel drift, we won’t make the gate without hitting the inside cone.
When we say a particular tire is easy to drive, this is what we mean. We can play with the grip on the other side of slip more easily, more controllably. I expect this is why I find the Rival-S easier, and perhaps for me faster, than the RE71R I drove last year, even if it doesn’t produce the better lateral-G number in a skid-pad test.
Skill #2: Driving the momentum-maintenance line
I’ve heard it said that all autocross cars, even super high power-to-weight cars, are momentum cars. I think this is a key insight and mostly true.
I’m not saying there is no difference in driving high-power vs. low-power. If you’re a regular reader you know that I’ve spent a lot of time trying to figure out how different the line should be based upon acceleration capability.
I started autocrossing in a relatively high-power, heavy car (400hp CTS-V) then went to medium weight, relatively high-power car (345hp Corvette) but have now bought a old Porsche 944 with all of 162hp (once upon a time) to drive in E-street. (No, I don’t think it’s the car the have in E-Street.) One of the reasons I did this was because I came to believe that I was never going to master momentum maintenance (in the time available) unless I was forced to by driving a low-power car in a “momentum-maintenance” class. I’m taking advantage of the fact that, for me at least, losing is a great motivator.
To my advantage I have at hand locally one of the greatest masters of momentum-maintenance that ever came down the pike. He headed up Twickenham Automobile Club’s autocross school in Huntspatch last Saturday. I was lucky enough to be invited to attend in the role of an instructor. I think I learned as much as the students I was coaching. I just didn’t get to actually practice the concepts until the autocross the next day.
I don’t pretend to be an expert in the techniques of momentum-maintenance. I’m going to do my best to give you the gist. The school this past weekend showed me how inept at this I am. Give me a couple more years, please. I’m just saying that no matter what class you’re in, you won’t be really fast unless you master the techniques of this skill. Then you can layer other skills, knowledge and techniques on top.
The basic concepts of momentum maintenance, as I understand them, are:
- Find the simplest, largest radius arcs possible through the tightest, slowest features
- Work backwards from these largest possible radius arcs to determine the correct approach position so you can drive that large radius arc through the feature
- Extend these largest possible radius arcs from one feature to the other until they intersect tangentially between the features, usually about half-way in between
- At the tangent/intersection points turn the steering wheel as fast as possible, within the car’s ability to transition, to produce as much of an instantaneous flip from cornering in one direction to cornering in another direction, just as if you are driving a slalom
Followed with complete rigor, this method of determining the line through a course will produce nothing but arcs, with no straights at all, if the course is tight and busy. Of course, this is not 100% correct 100% of the time, but this is the basic idea. If there’s a long distance between the features then probably the arcs will not intersect. Consider those instances your chance to drive in a straight line, or nearly straight line, remembering that most cars can accelerate fully in 2nd gear and still be turning.
Anywhere the largest possible arcs through the slowest features do not intersect is a distinct advantage to the higher power car or class. Course designers please take note. In fact, it occurs to me that the ratio of total course distance to distance between non-intersecting arcs (or arcs above a certain radius) might be a scientific measure of how much a course favors high-power vs. low-power.
Braking, including trail-braking, and accelerating is generally required only to transition from one radius arc to another, which may include increasing and decreasing radius turns, either explicit in the course design, or implicit in order to connect arcs.
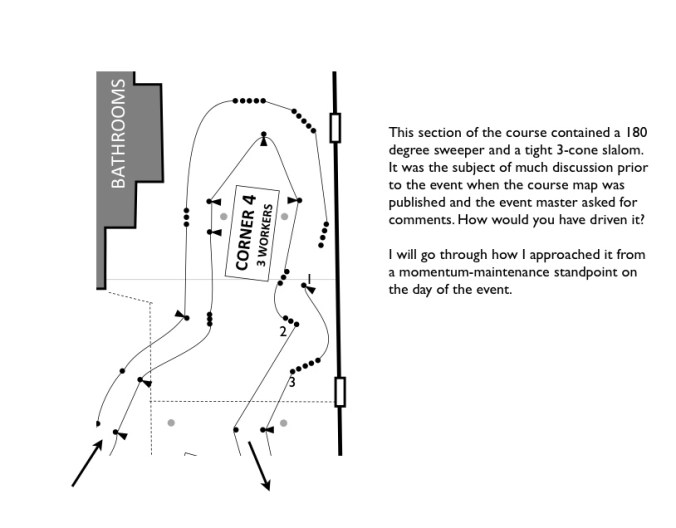
As a real-world example, here’s the starting section of last Sunday’s course, as designed by Charles Krampert:
First Section of TAC/TVR #4
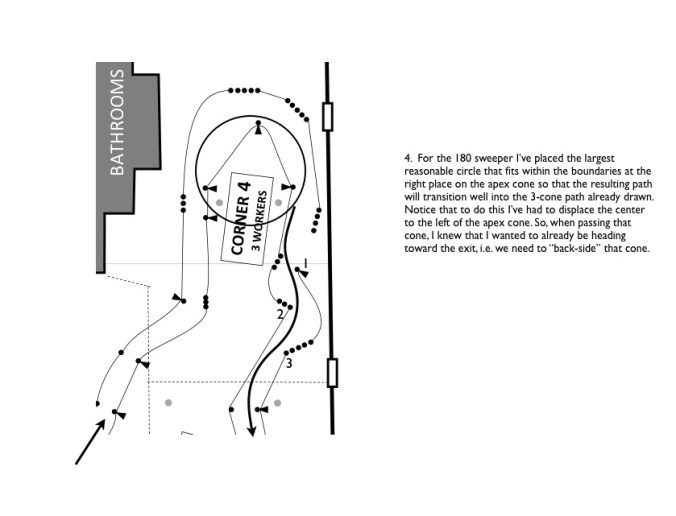
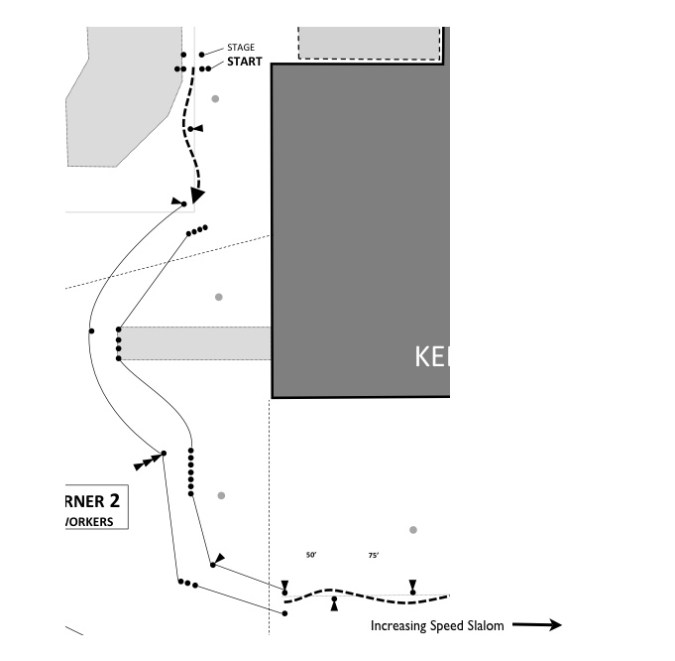
I felt the most important thing in this first section was to enter the increasing slalom at high speed. The slalom cones were offset the easy way and with increasing spacing so it was full throttle for me end to end, equivalent to a road-race corner leading to a long straight. We will be faster everywhere along that straight the faster we exit the preceding corner. The faster we enter the slalom, the more time is saved.
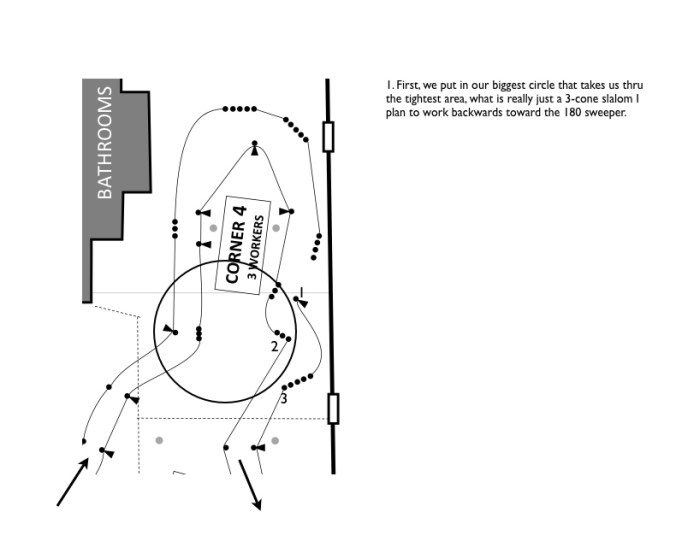
So, the first thing I do is draw the biggest feasible circle that properly leads into the slalom:
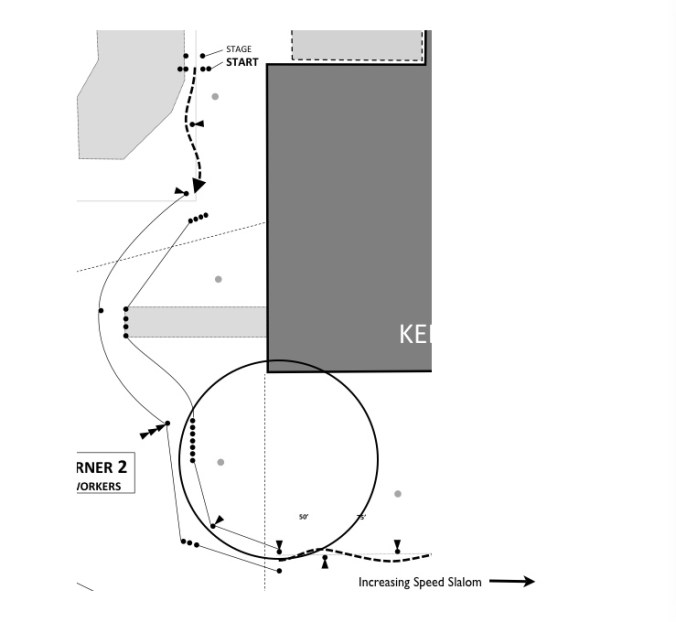
Big Circle To Allow Fast Entrance To Full-Throttle Slalom
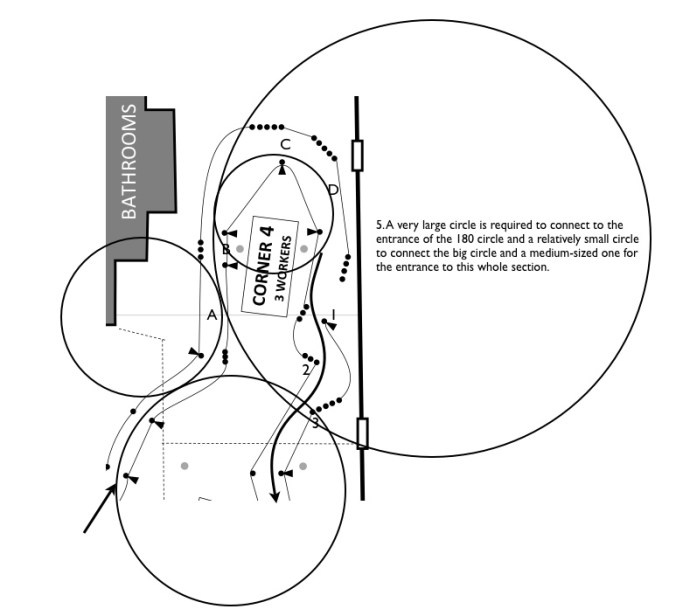
Now we know that if we get onto this circle we can enter the slalom at the fastest possible speed, with the limitation of coming from another corner. If the circle were drawn much larger, no way to get onto it from the previous corner.
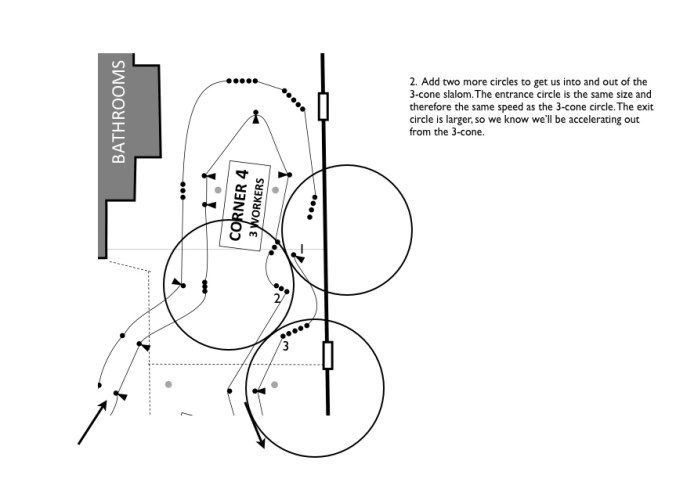
Next, we work back to the previous corner and draw another circle, as big as possible that connects to the first circle, but that we know will connect to a circle coming before it and meeting about half-way between. This second circle is necessarily a little smaller than the first one, because of the shorter distance to the previous feature. Just like in a slalom, the shorter the distance between cones the smaller the radius of the arcs and the slower the speed for a given lateral-G capability.
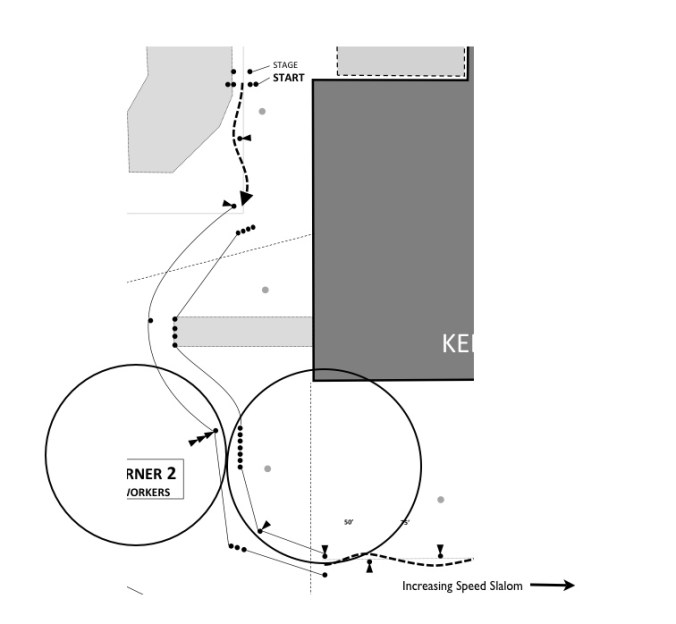
Second Circle Tangent to First
Here I’ve worked back one more circle:
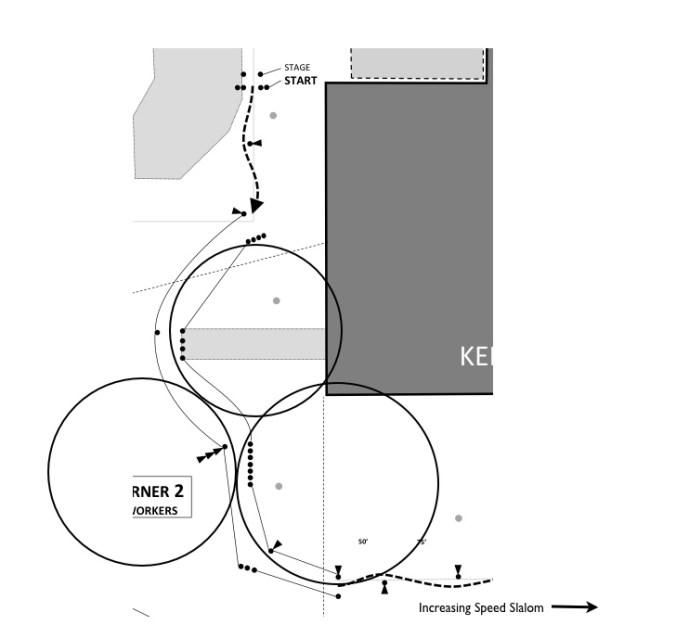
Third Circle Reaching About Halfway Between Features
From the start to the third circle there are only two turns, so two more circles. These two are necessarily smaller because the distance between the features is shorter.
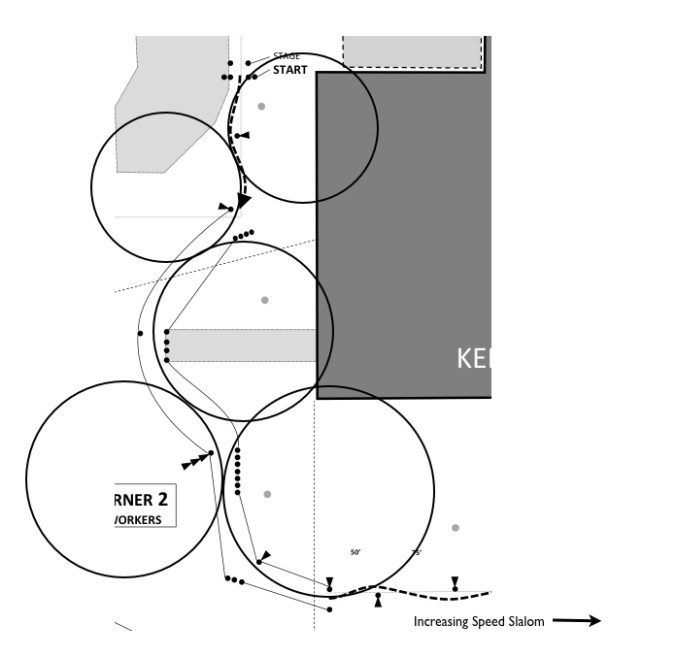
Five Circles Means Five Turns
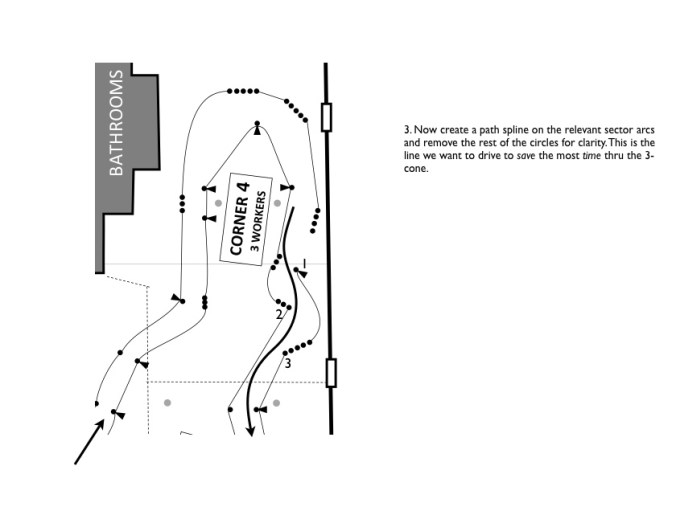
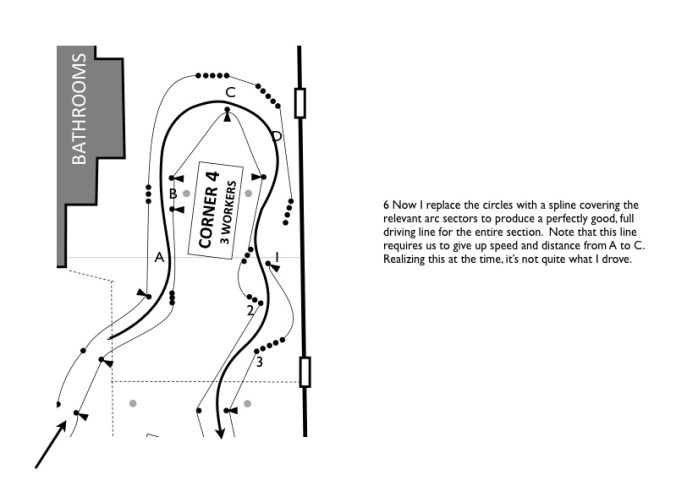
Now, we draw the momentum-maintenance line, using the tangentially connected sectors of the circles. This is the line I drove and the line that won the class that day. There wasn’t a straight section anywhere. I lined up to start turning immediately from the staging location.
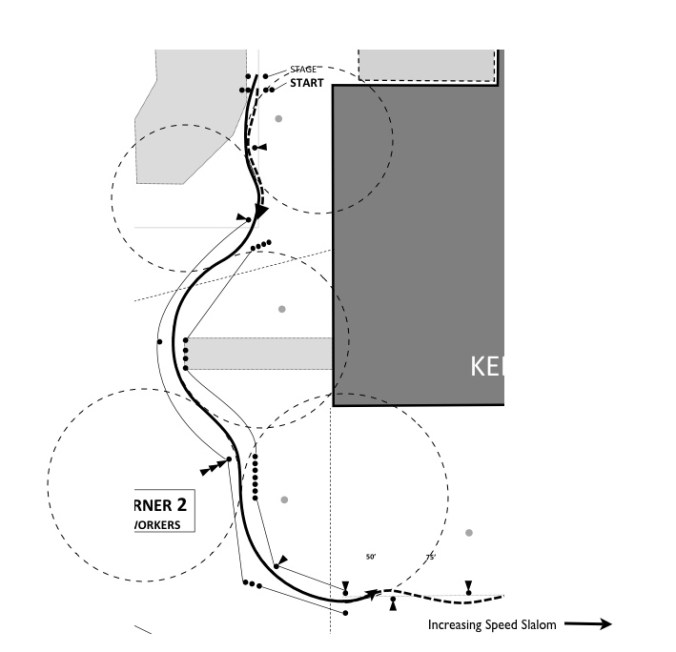
Five-Arc Momentum Maintenance Line
We normally have to do this circle drawing in our head at the event and “see” the resulting path in front of us while driving.
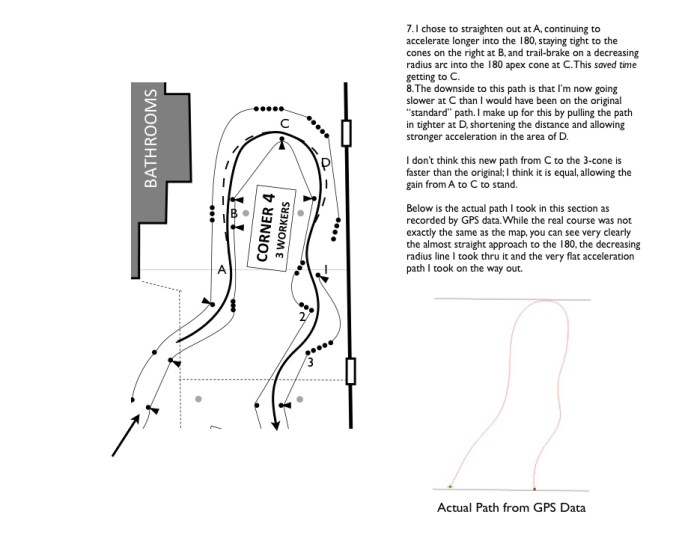
Now you know everything I think I know about momentum-maintenance. Please don’t get too excited and tell me, well, you haven’t even mentioned looking ahead, you fool! My instructor told me that’s the most important thing in autocross.
Of course your instructor is correct. You can’t properly drive the line I show above without looking ahead and a lot of other things as well. I just can’t put everything in one post. For now, I want to answer the question, “What am I supposed to be looking ahead at?” The answer is not only the cones in front of you, but the path you want to follow through those cones. That path you have to imagine and project onto the pavement.
Which brings up an interesting point. What if someone invented a heads up display that projected the path in front of the car as an assist to the driver. Would it be legal?
Skill #3 is car setup. Even in Street, the lowest preparation class, this is vitally important.
Not many production cars come off the assembly line optimized for autocross. They don’t even have autocross tires as an option! What are the manufacturers thinking? This is annoying, but just the way it is. So, we have to pick up the slack and optimize the car for autocross as God intended.
I’ve never been in anything but the lowest preparation class, so forget about me writing a book on car setup. Not gonna happen. I started this sport late in life. I don’t have time to learn everything.
But, for the raw beginner, I’ll just list the major things that in general need to be done to a Street class car to produce maximum competitiveness.
- Install wider than stock, top-performing autocross tires. The right brand/model changes over time, but is always a major discussion topic on the internet.
- Take advantage of the one sway bar change rule. For RWD and AWD, this usually means a much stiffer front bar. FWD cars often do the opposite.
- Maximize negative camber within the car’s adjustability. Not many production cars allow so much negative camber (approaching 3 degrees) that it will kill your tires in daily driving.
- Optimize front and rear toe. This is very car specific, but can be done at the site (with a portable jack) and restored closer to stock for the daily drive to prevent rapid tire wear. Test until you know the best settings for your car. I usually adjust one front tire for some total toe-out, then put it back to toe-in after the event by counting flats while turning the tie-rod. Who cares if the steering wheel is a little off-center during the run? (If you do, you can adjust each side equally. But, ain’t nobody got time for that. You should be walking the course, thinking and planning.)
- Test until you understand the effect of tire pressure and know the range for best grip. This may vary by site surface, ambient temperature, sunlight, etc.
- Install high-performance adjustable shocks and test until you know what settings work for what level of site grip and bumpiness and how to adjust to conditions on the fly
For most of us, our only opportunity to test is at the events themselves. This is the big bummer of autocross. We must be willing to give up the near (beating someone today) to seek the far (beating many later.)
The higher preparation classes involve exponentially more knowledge and money to be nationally competitive. Of course, you can be fast, have a fast car and have a lot of fun without being totally committed to getting to the pointy end of the spear at any preparation level.