I had a great time at the Advanced Collision/Porsche of Chattanooga autocross last weekend at Soddy-Daisy High School. The lot is not big, but they did a good job of creating a fun, one-car-at-a-time course. Thirty-two folks came out and we got 8 runs. They’re planning another event in August.
I thought I’d take the liberty of commenting on a couple of choices folks were making at two key points in the course. The difference between the two is interesting. The first concerns turning nearly 180 degrees around a single pin-cone. The situation looked something like the figure below.

The approach speed was quite fast and too many drivers were taking the dashed line path. They often ended up nose into the wall of cones, having gone deep past the pin cone and coming nearly to a stop (some actually did stop) as they tried to not hit the wall. Others plowed into the wall, taking out 3, 4 even 5 cones at a whack.
The more experienced drivers took a better line more like the solid one, where they gave it up early, went wide to the left (it was a little painful to do), then added power as they went past the pin cone, already opening the steering wheel. This was a typical case of giving it up early to get more back later.
The second situation was leading to the finish and is a little more complicated. In this case most people were giving it up early to get more back later, only they didn’t get much of anything back. It looked like the figure below.
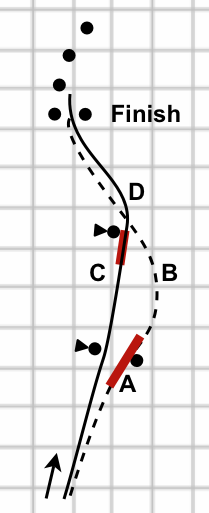
Once again, the approach speed was quite high. Most took the dashed line path, braking at A so they could loop out toward B. This gave them a clean way to get into the finish chute, under control and moving well. I chose a different option that saved time, I think, though it may have required more car control skill than is available to a novice.
I kept accelerating and didn’t brake until C, then jerked the wheel left and put the car into an oversteering slide at D. I then released the brakes, hit the throttle to send weight reward, which stopped the slide, and shot into the finish where I again locked up the wheels with the car tank-slapping right in order to not plow through the cones after the finish. Crossing the finish line I was a bit sideways and not moving very fast.
If the finish had not been the finish, if the course had continued further, then looping out to B would have been correct. What I did meant that I could not have continued on. I was totally out of shape by the finish line, but who cares? Once across the line nothing else mattered. I think the advantage was almost the distance between B and D.
Autocross is all about when and where to give it up to save time later, or not. It’ll either drive you crazy or keep you interested for a long time.
