I’m recovering at home today from an exhausting but exhilarating weekend at the Wilmington Champ Tour where B-Street, with 17 competitors, was a back-and-forth dog-fight that had the racers and the spectators going crazy.

Dawn on Day 2 at the Wilmington Championship Tour
Dawn on Day 2 broke with yours truly holding onto 1st place by a thread. I’d started Day 1 Round 1 with a run fast enough for an eight tenths lead. Greg Vincent had coned his first run but came back in the 2nd round to go in front by .087 seconds. Kenny Tsang, Allen Chen, Nathan Young and Michael Bombard were all struggling through the first two rounds with the extremely long and fast course, but that wasn’t to last.
After third runs were complete the top six were separated by less than 0.7 seconds. Allen came back from coning his first two runs to stand 6th with a 74.948, Nathan was in 5th at 74.827, Kenny was 4th at 74.751, Michael, after a cone and then a slowish run to get his bearings, rushed into 3rd with a 74.523, Greg stood on his 2nd run with a 74.319 and I improved slightly to 74.271 to end the day at the top by .048. So, it was Corvette, S2000, S2000, Corvette, S2000, Corvette in the top six.
I need to say a special thank-you to Mark Pilson. Mark had been my main instructor at EVO school and has always taken an interest in my progress. After his runs on Day 1 I asked him for any words of wisdom. I expected a point or two about a key corner. What I got from Mark was a complete, corner by corner evaluation of the course that really helped a lot. Thanks Mark!
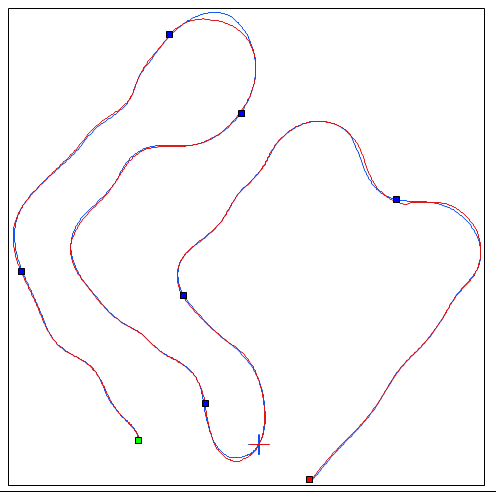
The Day 2 course was reversed, with significant changes and about ten seconds shorter. It didn’t flow as well as day 1 and was much tighter with a showcase decreasing radius turn that was throwing a lot of people way off the pace, including me.
After round 1, Allen jumped from 6th to 1st with a sizzling 65.253 for a total of 140.211! Nathan was also in the 65’s, moving from 5th to 2nd at 140.397. Kenny, Mike and Greg were all in the 66’s and stood 3rd (140.478), 4th (140.814) and 5th (140.989), respectively. I had center-punched two cones at the finish and was way down the list. I don’t want to even figure out where I was… too depressing!
Mike went out first for round 2 and slowed down. Then Allen threw down a 64.736, taking over the lead, and I’m thinking “64.7, are you kidding me? I can’t do a 64.7.” Sure enough I only manage a 65.311, which is just enough take the 2-day lead from Allen. Greg then does a 65.043 taking the lead from me. Nathan then goes Allen one better with a 64.622 which moves him to 2nd in the two-day totals. Not to be outdone, Kenny does the fastest time so far with a 64.604 and just like that he is in the lead! It seems like all the fast drivers are doing 64.7 or better except for me and I’m dropping down the order quickly.
Entering the 3rd round, it is now Kenny 1st, Greg 2nd, Nathan 3rd, I’m 4th, Allen is 5th, Paul Kolatorowicz and his Solstice has snuck into 6th and there have been so many lead changes we’ve all lost count.
Allen cones his 3rd run, so he can do no better than 5th. I’ve messed up the showcase turn both runs and know that unless I can fix it, I’m done for. (Scott Hurley had counseled me on how difficult the visuals were, so I really felt like I had been forewarned, but to no avail.) Finally, on the third try, I remember what Scott had told me, do it half-way decent and get my 64, a 64.422 in turns out, which slings me from 4th back to 1st. (You can see the video of that last run here.) Greg goes out and gets his 64, a 64.469, which solidifies him in 2nd, only .095 back of me over two days. Nathan, pushing for all he’s worth, spins right at the finish line, the back of the car comes close but does not cut the timing light, relegating him to 4th. But, what’s this? Nathan is doing a 3-point turn to get back through the finish, the corner workers are eyeing Kenny (carrying 2 cones) as he rounds the last sweeper, getting the red-flag ready, and I’m screaming “Get outta there Nathan… don’t you dare give Kenny a re-run!” Nathan clears the finish, Kenny does not get a re-run and ends up in 3rd place.
Man, was I drained. Top six were Corvette, S2000, Corvette, S2000, Corvette, Solstice, with the top five separated by a total of 1.001 seconds over two days.
Here are the top 5 trophy results:


The weekend proved one thing: there’s nothing exciting like a big class with a several folks all closely bunched at the top, trading the lead back and forth. B-Street may not have the name talent that SSR does right now, but it’s just as exciting, has 55 people registered for Nats, and the class is definitely getting faster.