(I suggest you read the post below and then read the update here.)
Well, almost never.
While the late-apex cornering technique is a staple of road-racing and track-day driving, it has almost zero applicability to autocross. Why? Autocross almost never has an acceleration zone long enough to make up for what you give up in the corner for the late apex. Occasionally, yes, you will want to late apex, but not very often. Autocross is mostly made up of connected curves of varying radius. Usually it’s best to simply take the shortest path from one to the next, as Piero Taruffi stated in the first-ever scientific book on race-car driving in 1959. He was right then, he’s still right.
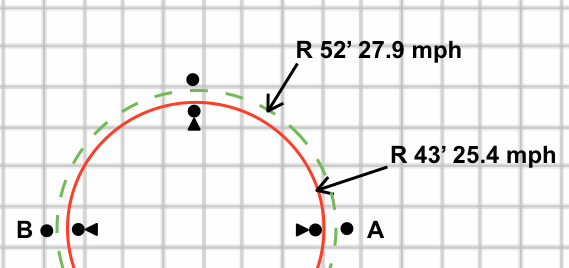
Late-apexing is done on track for various good reasons, but the only one related to saving time is to increase exit speed off the corner by “lengthening” the straight. The increased exit speed is carried down the ensuing straight whose average speed is now increased, reducing lap time. This is the only occasion to use a late-apex: when the length of the ensuing straight is long enough to save more time than lost in the corner.
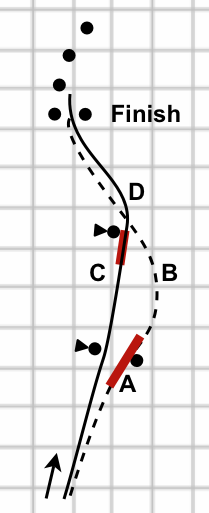
Be careful not to confuse late-apexing with the technique of “back-siding” the cones. Back-siding a cone is not late-apexing. Back-siding a cone is a result of the racer deciding where the beginning and end of the corner are and on what radius. When he tells you he plans to backside a particular cone, it means he has decided that that cone is on the minimum radius but not at the apex of the “corner” he has imagined out there among the orange cones. When he passes it he plans to try to run over the base of the cone with his rear tire, meaning he is wrapping around it in order to be going in the best direction toward the next feature. By definition, therefore, the backsided cone is not an apex in the road-racing sense because the car continues to turn hard well past it.
Now, I suppose one can be perverse and “decide where the corner is” and decide to late apex it and decide that the cone marks the late apex or is at least within shouting distance of it. In that case I admit that you have sort of backsided the cone and pulled off a late apex simultaneously. Good luck with that. Please go back and read the title of this post again.
Be aware as well that designating an offset cone as your corner exit and deciding you want to be accelerating at that point toward the next offset cone is also not late-apexing. (I plan a later post on that subject, complete with diagrams and spreadsheet calculations. I know: You. Just. Can’t. Wait.) How you performed that corner, what path you took, etc. determines whether you late-apexed it or not, not what you were doing as you passed the cone marking the exit. Did you take an extra-long, small-radius, time consuming path that allowed you to increase the length of the straight you created toward the next cone, rather than get to the cone on the shortest, fastest geometric radius? Then you did, indeed, late-apex that baby. You were probably wrong. And slow. 2019 Update: Adam Brouillard in The Perfect Corner has shown that the car that takes the “extra-long, time consuming path” never catches up to the car that didn’t, no matter how long the straight that follows.
Remember that in good autocross course design, the exact location of the corner and even it’s radius is to a large extent at the discretion of the racer to decide. Yes, most of us have seen courses completely lined on both sides with a zillion cones, all marking a path 12 to 20 feet wide. Unfortunately, some organizations still do courses like that, but the top levels of the sport have moved beyond such drudgery. People who always race on such courses will never get FAST at high-level autocross. If they should attend an event where the path is not dictated to them, or even if it has only one or two sections not dictated to them, they become lost, dazed and confused. It’s not the heat, it’s the course.
This is one reason why autocross is so challenging and so rewarding. Every course is different and full of “corners” that the racer has to look ahead and “find” before he can even analyze and then drive them! This may also be why road-racers typically have a hard time adapting to autocross if they didn’t start with autocross. On a track the “corner” is more of a fixed, known quantity. There is great skill in figuring out how to take it at ever greater speeds, how to pass someone in it, and how to not get passed in it. Plus, the same corner is different in different conditions. However, the skill of “deciding where the corner is and what it looks like” doesn’t get developed.