Today, I was reading the latest issue of one of my favorite magazines, Grass Roots Motorsports. In an article about setting up a Mustang with high-dollar shock absorbers I found that what the author says about shock tuning is incorrect.
I don’t mean a little bit off, I mean totally backwards.
Like this: “For example, maybe you want to reduce the rate of dive when trail-braking. You can add some compression at the front of the car, but you can also take some rebound out of the back and accomplish a similar goal.”
What?
Since the rear shocks are extending during braking, the complement to increasing compression resistance in the front shocks is increasing rebound damping force in the rears. You wouldn’t “take some out” you’d add more if you want to slow the rate of dive.
At first, I’m thinking that maybe this was just a simple mistake? The part about reducing the “rate” of dive with added compression was right, if not exactly clear why it might be useful.
Then I got to this statement with regard to cornering: “So, if we speed up weight transfer in the front (by lowering the front compression and rebound settings)…” and my heart sank. I realized that this is not a simple mistake in terms but rather a major misconception about what shocks do on a car.
I suspect the author thinks that by “reducing the rate of dive while trail-braking” he thinks things will happen slower and softer and be more controllable. It seems like he thinks that reducing compression and rebound forces will speed up weight transfer across the axle when cornering, or to the front wheels when braking, presumably on the grounds that this frees the suspension to achieve the final, rolled-over state quicker. Bzzzzt! 40 lashes!
This misconception absolutely guarantees that you can never figure out how to tune your car’s handling by making shock adjustments.
The truth is just the opposite.
This case illustrates a concept that is difficult to grasp and, I’m here to tell you, difficult to explain. I’ve had this discussion several times with various people and I don’t seem to be able to get it across effectively. (I suspect the shock company representative quoted in the article had the same problem with the author of the article.) I see this as a personal failing. I’m going to try again here, in writing. I suspect it’s hard to understand because it’s a dynamic situation that’s over very quickly and, well, like the author says in the article, people just don’t understand what shocks do. Man, he got that right!
Every time you touch the brakes, move the accelerator in either direction or make even the slightest steering input the shocks do two main things: create forces and absorb energy. Absorbing energy from the oscillation of the springs “damps” the spring (and car) motion and is usually said to be the primary function of the shock (damper).
What shocks do is complex, and we are going to only scratch the surface, but understanding the forces they create is the easy place to start. The textbooks all start with damping. Forget about damping. Forget you ever heard the word. It’s much more important for the autocrosser to understand shock forces first. Focussing on force creation rather than energy absorption is the key insight that I hope will allow me to get my main point across.
So, what do shocks do? They produce forces that always resist motion. They resist pitch, roll and twist of the car. In so doing, they speed up weight transfer and slow down the motion they resist.
This speed-up-weight-transfer/slow-down-the-motion concept strikes many as paradoxical and may be why it gets misunderstood. But, really, it’s not very complicated. If a mass is set in motion and you create a force opposing that motion, then you will slow down that motion. It will, therefore, take longer for that motion to complete.
Let’s start by imagining we have a car with springs but no shocks.
Now, apply the brakes.
The dive downward in the front that results is resisted by increasing force in the front springs as they compress. (The opposite happens at the rear.) Where does the force go? It goes into the tires. They do the braking, not the springs, right? So, that’s where the forward dive load (forward weight shift) ends up. It goes into the tire contact patches and, as we all know, this increases the braking capability from the front end of the car while reducing it at the rear. Remember, the additional compressive loads in the springs are “reacted” immediately by the road at the contact patches. There’s no other place for it to go. Newton’s third law, etc.
With just the springs it would take some finite time, let’s say 2 seconds, for the sake of argument, for the extra load to build up on the tire patches. (I say “extra’ load because the front tires always had their share of the weight of the car on them to begin with.) It builds up linearly with spring compression distance because the springs are generally linear in their action. That’s why one number, the spring rate, can usually describe how they work. A 200lb increase in force for each inch of compression, for instance, might be the spring rate for each front spring on a stock car. If there are no shocks this is exactly the same thing as saying the weight transfer isn’t complete until the dive motion ends. And you won’t achieve full braking at the front (full load at the contact patches) until the forward dive has reached it’s final position.
This sounds suspiciously like what the author of the GRM article was thinking. Remember, this is with no shocks on the car.
How much weight transfer occurs? If we assume our 200lb/in spring compresses 3 inches in those 2 seconds, then we’ve got 3in x 200lbs/in = 600lbs of weight transfer to each wheel, or 1200lbs total that wasn’t there before. That 1200lbs has been transferred off the rear wheels, of course, which is why rear brakes are smaller in size and heat capacity than front brakes on most cars.
Now, reinstall the shocks and brake again.
The front shocks will develop a compression (bump) force more or less proportional to the rate at which the shock shaft moves (the shock shaft velocity) as the dive begins. This force resists the compression of the shock. These forces can be very high if we want them to be. For instance, a shock could develop 400lbs at 1 inch per second of shaft speed. (Ok, so it’s a little on the high side of normal practice. Please bear with me.) So, now, when the springs might have compressed 1 inch and the shock shaft is moving 1 inch per second we have 200lbs of new force from the spring and another 400lbs of new force created by the shock. Again, all such force is reacted by the road at the contact patches of the tires. The shock has barely moved, the dive has just begun and we already have our full 600lbs of weight transfer to each front wheel. All that extra weight that the front tires “feel” came off the rear tires and it got transferred in approximately one-third the time (only 1 inch of motion out of 3 inches total that will eventually occur) as without the shock in place. This is the essence of “increasing the rate of weight transfer.”
The resistance to compressive motion provided by the shocks adds to the resistance from the springs and it happens as soon as the shaft starts moving. It starts to happen early, long before the springs have reached their final, compressed state. Just like the spring resistance created a load increase (weight transfer) into the front contact patches, the shock resistance does the same thing.
Imagine that the front shock has so much resistance to compressive motion that it would only let the shaft move at, say, 1 inch per hour, even if you pushed on it with a million pounds of force. In that case, weight transfer will be essentially instantaneous without hardly any dive motion ever taking place. Hit the brake and the loads at the tire patches instantly increase due to weight shift. A little bit of the load increase (weight shift) comes from the springs, a whole lot comes from the shocks. And essentially no dive rotation has taken place! We need to get this point: thanks to the shocks, weight shift need not be directly proportional to body rotation, either in pitch or roll or combined pitch and roll (twist).
The super-stiff shocks in the thought experiment have now created a kart. You can’t get weight transfer faster than with a solid, non-movable suspension like on a kart. You don’t doubt that weight transfer occurs in karts, do you?
Given this scenario, the car never gets to full compression of the front springs. Not in any reasonable amount of time. But, full weight transfer was achieved (except for the extra that would have happened due to the suspension motion, which is mostly bad anyway, especially when cornering) and it happened fast, long before the springs were ever fully compressed.
Shocks make more of the weight transfer happen earlier by creating forces that resist the shaft motion. They front-load the weight transfer. At the same time, they reduce the rate of pitch or roll, making the car take longer to achieve the final, stable position, on which the shocks have no effect, neglecting the effect of pressure in gas-pressurized shocks.
Do we care how long it takes to achieve the final position? Not much. We got our braking force earlier in the braking process than otherwise. We didn’t have to wait those agonizing 2 seconds for the full dive to occur. That means we stop in a shorter distance.
Yep. Shocks can have a big effect on real-world stopping distances, even though the tires and the brakes haven’t changed. Worn shocks can kill you on the street, not only with poor handling but with increased braking distances.
The same thing happens when cornering. The compression damping from the outside shocks and the rebound damping on the inside shocks both create forces that resist roll, slowing it down, and, by doing so, increase the rate of weight transfer across the axles because all forces created are reacted only at, and immediately by, the road at the tire contact patches.
So, one way to tune the car with the shocks is to set how fast we load up the tire patches and to control which ones load up earlier or later than others in the differing conditions of pitch and roll the car encounters. Loading up the contact patches too fast makes the car hard to drive and easy to lose traction due to loss of compliance. You may be forced to slow your hands when cornering for instance, to keep from impacting the tire contact patch so hard and fast that it loses traction.
Too slow is terrible, at least in autocross where transient response is so important. A big difference in load rate front to rear will create an unbalanced car because one end will load up and reach the limit faster than the other end. When that happens, that end of the car starts to slide.
If a car is naturally unbalanced due to other factors, then we may be able to re-balance it with shock tuning.
To sum up, slowing the rate of pitch or roll is achieved by resisting it. To do this we design the shock to create a force that resists the motion of the shock shaft. Resisting shock shaft motion increases the rate of contact patch load change because the resisting force is created immediately with any shaft motion and very quickly reacted (through the structure of the suspension, wheel and tire) by the road at the contact patch. You might say the force is “created” in the shock, “travels” to the tire contact patch and is “resisted” by the road.
Here’a real-world example of the forces developed by shocks intended for street-class autocross where the springs cannot be changed. These are the force curves for the shocks I’ve been running on my Corvette. The positive curves are for compression and the negative curves are for extension (rebound). At only 1 inch per second of shaft velocity each front shock produces about 220 lbs of force resisting the compressive direction with the adjuster 5 clicks down from the maximum. The rears are a little less. At the maximum adjustment the force values are even higher.
Above 8 inches per second the forces are over 400 lbs in both the compression (bump) and extension (rebound) directions.
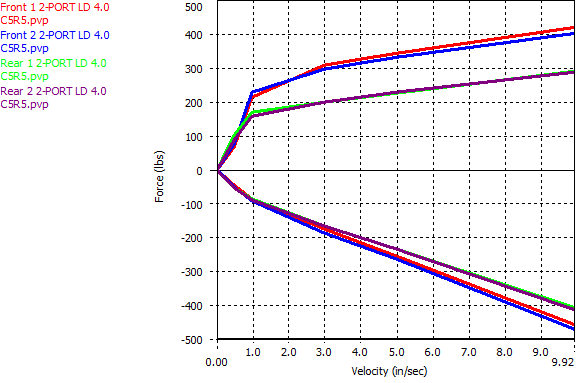
2022 Addendum: The shock forces shown in the graph above turned out to be too high, especially front compression (at all velocities) and both front and rear rebound at high velocities. After I learned to figure out how much force the shock “should” have I ran them at much reduced settings and received increased grip, but there was not much I could do about the linear rebound curves less paying up for specially-valved double-digressive pistons.

Pingback: Basics Of Shock Absorber Tuning | Saving Time – An Autocrosser's Blog
Hello, I am so glad I finally found someone who agrees with me on how a shock truly affects a vehicle during weight transfer. There are so many people on the internet these days who have it backward. I cringe every time I hear one of them say a softer shock speeds up weight transfer. I am involved in dirt late-model racing but when it comes to this we are all the same. Thanks for the article.
LikeLike
Thanks very much for reading it! You may be interested in the latest post on this blog as it covers some of the same subject but in more detail.
LikeLike