At the end of the last post I said I didn’t know how wide to go on entry. That’s not exactly true.
I was trying to explain this to a friend last night and I realized that maybe I owed it to the readers to get down off the theoretical high horse and explain the process I use during the course walk to figure it out, i.e. when is a chicane necessary and how wide to go. It’s a little bit complicated, but it really is what I do. You can, as always, decide for yourself whether to take it or leave it. If you think any of this helps, fine. If not, forget about it. Most people do it basically right anyway, at least after a some experience. Only a poor few of us have to really think it through before we can do it at all correctly.
Let’s go back to the beginning and get a few things straight. Maybe this will be all too obvious to you. If so, I apologize.
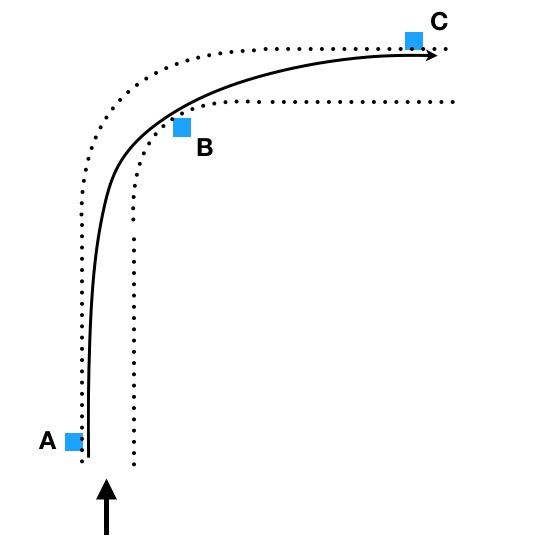
Figure 1
First thing: in Figure 1 above, we can rest assured that cone B is the position of our proper apex.
Oh, I better make this clear: the definition of apex. The apex is the location and angle at which the trail-braking entry spiral, during which the car is slowing and the path radius is tightening, ends and the exit spiral, during which the car is accelerating forward and the exit spiral is opening, begins. It is therefore, by definition, also the location of minimum corner speed. Furthermore, for each car, corner and set of conditions, there is only one correct apex in the sense of the fastest way through the corner.
[Update: the “exit spiral” is mostly circular for low-power cars in a medium-sized corner, or a high-power car in a fast corner. In the small, slow corners of autocross it is somewhat of a spiral even for low-power cars. You know it’s mostly circular if you keep the steering wheel in about the same place until the end of the corner when you quickly turn it to center. It’s more of a spiral if you are gradually opening the wheel after the apex.]
This is actually a peculiar situation and one of the key differences between autocross and track driving. In the track corner, say the dotted lines shown, we will find the correct apex somewhere along the inside curve, maybe at B, but it takes some thought to figure out exactly where. This is because the apex is as much the angle of the car as a position and with the paved border of a track the angle changes with position, thus complicating things. Not so in autocross.
In autocross the apex position is the cone in the situation shown. I’m going to assume you understand this. If you aren’t completely clear why this is the case, go read Brouillard. If you’re a beginner, do me a favor, give me the benefit of the doubt and assume that cone B is the location of the freakin’ apex.
But, what about the car’s angle at cone B, the second part of the apex definition? Ah, there’s the rub. That’s what we have to figure out in autocross.
Second thing: regarding track limits, we know the almost-always-correct rule for a race track is to use all the available space. That is, go as wide as the track limits allow, at least 99% of the time if you aren’t limited by, say, another car in an actual race or some weird traction situation. There’s almost never enough track so the basic rule is simple: use it all.
In modern autocross we often find the opposite. There can be too much track. So the road racer’s rule to use all the available track is of dubious utility. In autocross we actually have to decide whether to use all the available space or not. This is one of the cool things about the sport. (Unless you’re at one of those retrograde locations where they line the whole course with cones.)
Third thing: to be slightly ridiculous, we need to be clear that the path shown in Figure 2, below, might be possible in an autocross, but is probably not optimal. We could brake at entry cone A, turn left, do a loop and accelerate to the apex cone. Perhaps we pass the apex cone going 100mph and we’re doing a buck-thirty-five at the exit. Now that would be maximizing your exit speed!
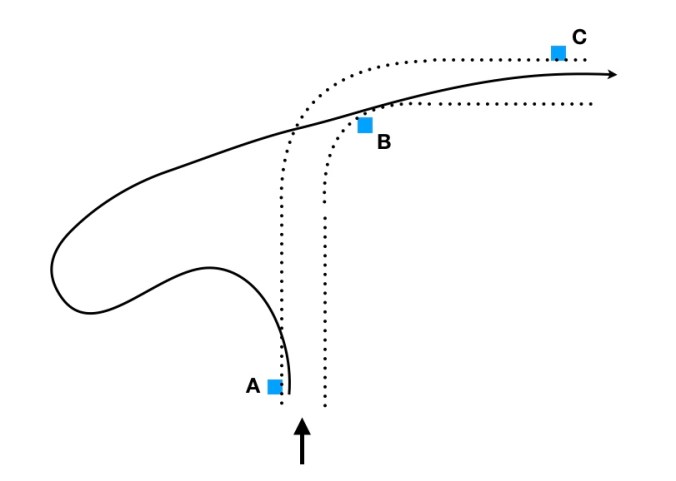
Figure 2
I’m going to assume that we all know it wouldn’t Save Time, however, even if the following straight was of infinite length. You never catch up to the guy that did it right yet exited the corner at 45mph. If you don’t understand this then, once again, go read Brouillard. I sometimes think of it like this: it is rarely correct to go in the wrong direction.
Didn’t Yogi Berra say that?
So, the path we need to drive may be something like what’s shown in Figure 3, below. The question is whether and if so how far “outside the track limit” should we go. I’m going to give you my process for figuring that out. This will necessarily be a qualitative treatment, however, not quantitative. (Thank God for that, I heard you mumbling.)
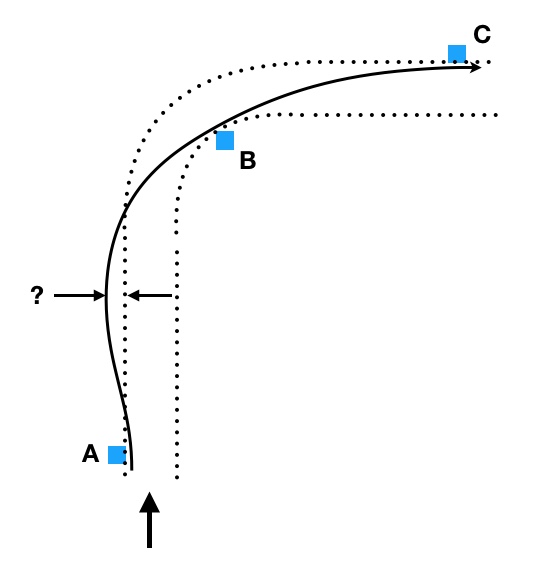
Figure 3
So, here’s what I do during the course walk, in two parts. (If you find this backwards, it’s perfectly reasonable to reverse the steps as it’s a back and forth, iterative process by nature. Brouillard, in fact, starts the other way around, which may be easier for some.)
First part: optimize the exit, that is, the path from B to C
Second part: figure out how to drive the entry, A to B, to ensure the optimal exit
I start by standing at cone B and looking toward the exit like in Figure 4.
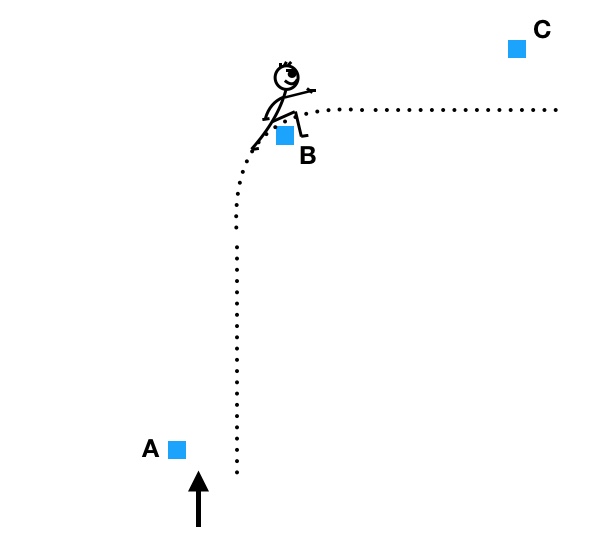
Figure 4
Now I ask myself what angle the car (my car, not your car or any other car) needs to be at cone B so that when I add throttle at B and start opening the wheel I’m able to use as much acceleration (both forward and lateral) in the new ideal direction as the car is capable of and yet not hit cone C.
Here in Figure 5 is our angle and an estimated (Euler spiral) acceleration path in red to the exit at C.
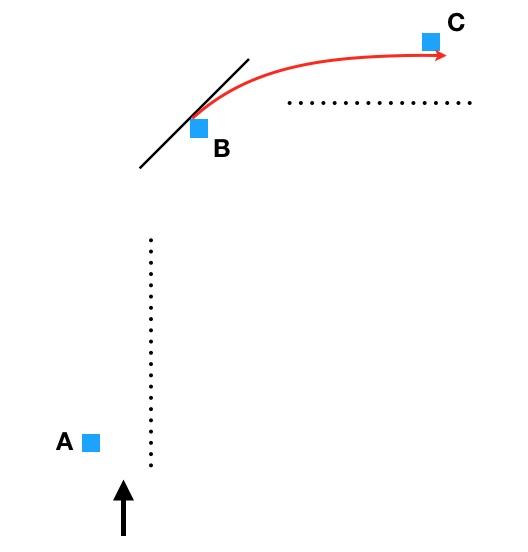
Figure 5
But, in order to draw this exit path I necessarily have to imagine one more thing: how fast I’ll be going at B when I hit the accelerator and start opening the wheel.
You may ask, how can I know how fast I’ll be at B, when I haven’t planned the path from A to B yet?
That’s a good question. The answer is that you have to sneak a peek back to A, estimate it and then iterate. (I know that some people say to never look back during your course walk. Sorry, no can do. You gotta study the course from all angles.)
Now that we have an estimated, optimized exit path, we think about how fast we will be going at A and what path and how much braking we need to get to B at the speed we estimated in step 1. Simple, right?
But, that’s what we do. And we draw the green path as shown in Figure 6. In our head. During the course walk.
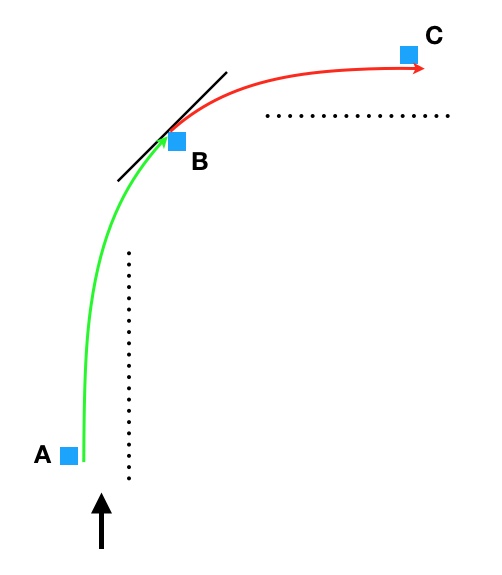
Figure 6
Did the green path exceed the track limits? Hell if I know. This is autocross. There is no track. All I know is that the green path gets me to the apex in the least amount of time and at the right speed and the right angle to produce the fastest possible exit.
Okay, I played a little fast and loose with you there. Let me make it up to you. In the next figure, Figure 7, I’ve moved cone A over to the right make it clear that the original green path won’t work. What do we do now?
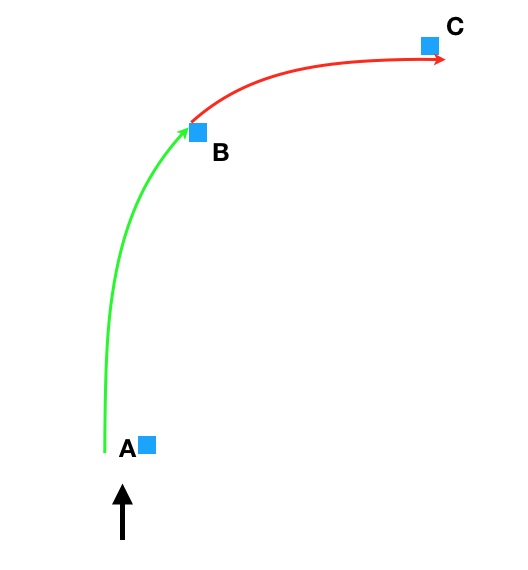
Figure 7
Now we clearly have to create a chicane by turning left at cone A in order to get any kind of reasonable angle at cone B. Otherwise we will be forced into a very small radius corner which will be really, really slow. In theory we’d like to get to the same apex angle and same speed at cone B as before, but we probably can’t. The problem is that having to turn left at A and then back to the right (unless there’s a whole lot of distance) means that our speed when we get to B will be a little bit slower. All because the location of cone A is pinching our entry.
If our speed at B is a little bit slower it means that we may be able to reduce the apex angle a little bit and still get full power on the exit. So, in Figure 8 I rotated the dashed angle line a little bit counter-clockwise from the original angle and modified the red exit path accordingly. The original exit line was for a different speed at the apex, so it must change to use a different part of the Euler spiral.
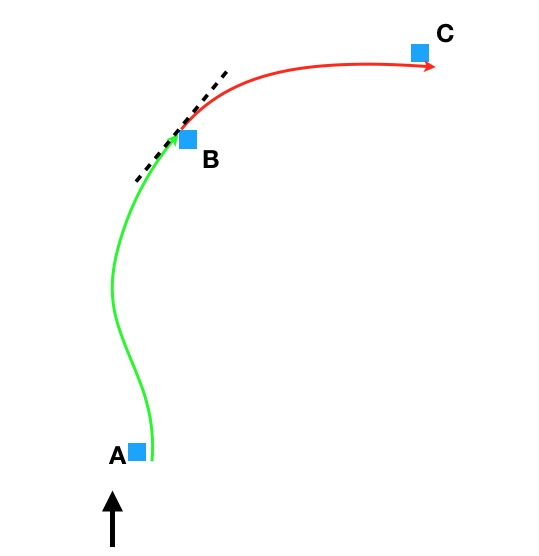
Figure 8
The exit is not quite as fast as before thanks to the pinchy entry. There’s no way it can be.
The answer to the original question is, therefore: Chicane it out only as far as necessary to produce an optimized exit for your particular car, namely one where you can create as much speed as possible at the apex at an angle that allows you to use all the car’s lateral and forward acceleration ability after the apex and still make it past cone C. We must play off the entry path and the exit path against each other, taking into account the braking ability, cornering ability, acceleration ability and transient response ability of our particular car. We have to mutually and concurrently optimize a chicane entry into a corner for minimum total time through the combination.
Going out any farther in order to increase the speed at the apex will not Save Time. Going out any farther will be a variation of using the crazy path shown in Figure 2, except so small that only the stop-watch will notice.
Or, you can just wing it. You get three attempts.

Excellent discussion and I totally agree with your pinchy entry approach in theory. However, in my experience, the fastest line in this situation is often determined by the clean portion of the track (where the average racer drives – which is usually fairly straight from A to B). The optimal line, as you are suggesting, is typically covered in marbles. If only every racer read your blog and practiced this line choice…
LikeLike
Yes, all those minimum-distance-at-all-costs drivers are such a pain!
LikeLike