In part 1 I wrote about three definitions of late apexing. By the time we got to part 4 I think I’d muddied the water a little bit. (That happens when you haven’t written each section before publishing the previous one.) So, let’s get it straight once and for all by slightly revising the three definitions:
Definition 1: An apex location that’s beyond the geometric center of the corner.
I don’t think we need to add anything more.
Definition 2: An apex location that’s beyond the accepted correct apex location.
This definition applies when people think that there’s one and only one apex location for a corner. OK, maybe it changes in the rain, but basically it’s the same for all cars.
Definition 3: An apex location that’s beyond the actual, correct apex location, understanding that the correct apex location will be unique to each particular car and situation.
Not much difference between 2 and 3, but the difference is crucial. Def 2 carries with it the implication that a single correct apex location exists based on the geometry of the situation, taking into account what comes before and after the curvy part of the turn itself. For instance, many have thought for the last few centuries that the length of the straight after a corner has an effect on the proper apex location. This has always been false. Many have also thought that the speed of entry, if limited by the preceding track geometry, has an effect on the proper apex location. This is correct. In fact, we find this ALL THE FREAKING TIME in autocross. Let me illustrate with an example taken from a real autocross event, not a made-up situation. Or, at least, not completely made up. As in all real-life scenarios it will be necessarily more complicated, but there may be multiple interesting lessons here to justify writing all these words about something I don’t even believe in, i.e. the concept of late apexing.
In Figure 1, below, we have the finish section of the East course at Solo Nationals in 2014 named Over The Falls by Jeff Cox, the designer. It was my first Nationals, in someone else’s car and before I knew much of anything about line theory. (What I thought I knew was mostly wrong.)
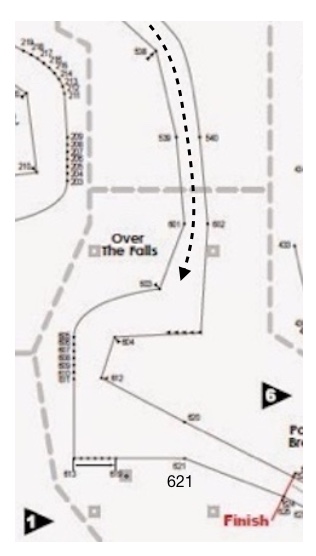
First of all, recognize that the entry to the Over The Falls section is very fast. You accelerate hard from the top of the figure downward. Where to brake? Where to transition from turning right to turning left? (This is, by definition, a chicane because you can’t optimize the right turn separately from the left turn.) The key question in my mind was where to apex the left turn toward the finish.
I really had no idea.
Why don’t you look at it and decide how you would approach this section. Below I’ll show you what I actually did. Each run was different! In my confusion I seem to have bracketed the possibilities in my three tries at it. Please do learn from my ignorance.
To complicate matters the Corvette I was driving was set up very differently from my own. It wasn’t as over-tired as mine (so it wasn’t mushy) and had high-dollar double-adjustable shocks valved and set to make it handle like a kart. Never before (or since) have I driven a Corvette that could transition like that one. The downside? Less ultimate grip than my car. It was like driving on a knife-edge and very difficult (for me) to drive without provoking an oversteering slide. The owner, who won his first national championship that week, kindly warned me after our runs on the practice course that I needed to control my overly fast hand speed, but that was not advice I could easily implement on my first-ever Solo Nats runs.
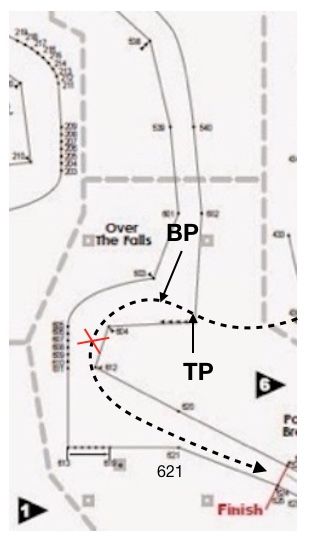
On the first run I started slowing early, somewhere near the location marked BP (braking point) in Figure 2, below. This allowed a safe and fairly rapid turn of the wheel at the transition point, TP. I wrapped tightly around the two inside cones, apexing about in the middle at the big red X. From there, being so slow, I could start adding throttle and accelerate toward the finish. Cone 621 was never the least bit in play.
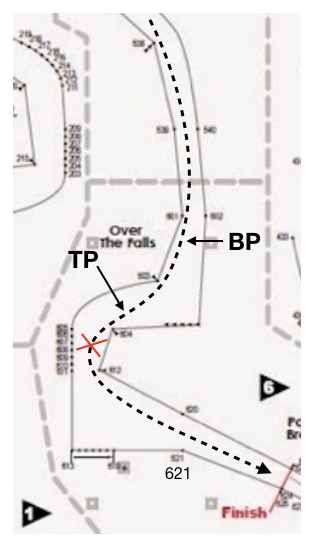
Seem reasonable? It felt very slow. I think it was slow.
This method guaranteed that I fell below the limit very early, the speed at the apex was very low and I used mostly just the power of the engine to propel the car toward the finish. The turn I executed had a very small radius, severely limiting the time during which the tires were pushing the car at high lateral acceleration toward the new ideal direction. In short, I made the mistake of not using all of the available “track”.
At least I didn’t slide (too much) or spin at the transition point, which is the only saving grace for this conservative (scared to death) approach on the first run. In fact, this run turned out to be my fastest overall, setting me into 9th place of 28 drivers on day 1, but not because of how I executed this section.
On the next run I made the opposite mistake, as shown in Figure 3.
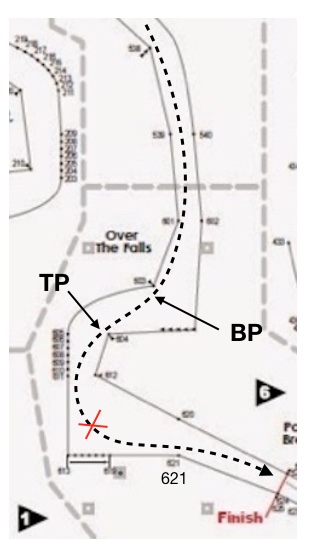
I entered much faster, getting on the brakes late and soft because of continued fear of losing control during the yaw transient point, which thus became more separated from the braking point in both time and space. As a result of the soft braking the car carried way deep toward the horizontal wall of cones to the left of cone 621. My apex was somewhere near the big red X, after which I struggled (very slowly) to get around cone 621. I don’t know which was slower in this section, run 1 or run 2. Both felt awful.
On run 3 I think I did it closer to correct. See Figure 4, below.
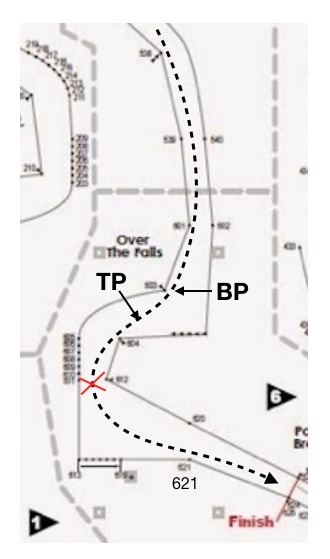
This time I got max on the brakes about point BP, even though I was already turning right pretty hard. I transitioned at the correct location, TP, while still hard on the brakes and managed, somehow, to not let the yaw moment create a spin. The apex was about at the big red X and was at a higher speed than both previous runs, but especially higher than run 1. I smoothly added gas from there. I barely made cone 621 which, these days, tells me I was doing it better. This better-optimized exit used all the space (track) available.
Starting from TP the lateral acceleration began building up, maxed out at the apex, but continued to help beyond the apex as the car turned toward the finish. Do you understand that the direction of this lateral acceleration is always tending to aim (left) toward the finish? It’s maximum magnitude is double what the engine could produce in that car. That’s why you want to use “all the available track width” to most efficiently add the engine capability after the apex and to best use the lateral acceleration capability of the tires both before and after the apex to push the car in the new ideal direction which, in this case, is toward the finish.
Unfortunately, the third run was not the fastest overall, though the final section felt much better. We got bit by overheated tires. That September day in Lincoln was unseasonably hot and my overdriving didn’t help the cause. After we both got slower on our second runs we realized what was happening and draped towels soaked in ice-water over the tires. It was too late. The carcasses of the tires were already too warm. In spite of each of us feeling like we drove much better on our third runs we both went slightly slower again. We stood on our first runs. Luckily, it was enough to give my co-driver the lead going into Day 2. He managed to very slightly again beat the fastest Honda S2000’s on the Day 2 course and take the win. This was back in the days of parity between non-Z06 C5 Corvettes and S2000s in B-Street when high-performance 200 Treadwear tires were just getting started. Those tires couldn’t put power down very well when exiting a corner which invalidated much of the Corvette power advantage. (That all changed when the Bridgestone RE71R came out.)
I contend that if the entry to this section had been different then our correct apex location would be different. Imagine that the course design causes us to take the path shown in Figure 5, below, approaching from the side and that the car’s speed is slower than before.
Now the transition point, TP, is earlier than the BP, which makes things easy. (We much prefer to stay on the throttle during the transition and then brake as the steering wheel crosses back over center.) So, no problem to now treat this as a standard corner of approximately 160 degrees once we are turning left. (We intentionally created a chicane on entry to get some angle, as we so often do in autocross, because it gets us through the corner faster by modifying the horrible pinched entry that this mythical course designer (moi) intended for us.) We apex somewhere about where the red “X” is located, about the same as in Figure 2, and add power from there to the finish.
My point is that the location of the apex is sometimes highly dependent on the speed of entry. If you accept this then you have to also accept that there is no such thing as a single, correct apex for any particular corner. Just the difference in the power to weight ratio of various cars is clearly enough to affect the best apex location, angle and speed even if only because it would affect the entry speed in a situation like this. Grip level also affects the apex, especially when you bring non-linear aerodynamic downforce into the picture. That also means that if the grip level of the surface changes, such as from a morning to afternoon temperature change, rain shower or any other cause, then you may have a new apex. For every corner on the course!
I hope you now have a clear idea of Late Apexing Definition 3: An apex location that’s beyond the actual, correct apex location, understanding that the correct apex will be unique to the particular car and situation.
Why would you ever take this type of late apex per Def 3, except by mistake?
Remember I said I don’t believe in the concept of late apexing? Let’s get into that now. I previously defined an apex as having three components: a location, an angle, and a speed. How is it useful to think about the concept of a late apex when it refers to only one of the three components, the location? Once we realize that an apex is not simply a location then I don’t think it is.
I’m sorry this has become so complicated, but I really do believe that, in theory at least, we have to determine the location, the angle and the speed for the location of minimum speed in any particular corner. At least I didn’t change that… the location of minimum speed is still the apex! Just figure out how fast you can or ought to be going at that point as well as the angle of the car to optimize the exit and you’re all done. Easy peasy.
One last thing: it’s fairly common in autocross, because of the interconnectedness from feature to feature, that we might enter a corner, say the approximately 160 degree corner shown in Figure 5, well below the correct speed at the apex, that is, the speed and angle at which we can rather quickly ramp up all the engine power. (This is exceedingly rare at race tracks for most cars.) If so, then we may be accelerating all the way through it in order to obtain that correct apex speed. In that case there’s no braking point! If you’re turning the car hard, but never have to slow down between the entry and the exit of a corner, is it still a corner? Not really. Brouillard, in his book The Perfect Corner 2, calls such situations “full-throttle corners” and has a special rule for them. I think that in autocross we encounter many such situations. Maybe we can’t be at full-throttle, but we may be using significant throttle to accelerate and there’s no braking point to be found. If you don’t have to brake there’s no corner in the standard sense and standard rules no longer apply. In that case I recommend paraphrasing a previous NFL team owner: Just get there quick, baby!
