One of the great freedoms (and complications) of autocross is that often we must decide the location and shape of the “corner.” Sometimes in a major way, but more often in minor ways that create small, but crucial, advantages. Let’s explore a real-life example from a recent autocross event.
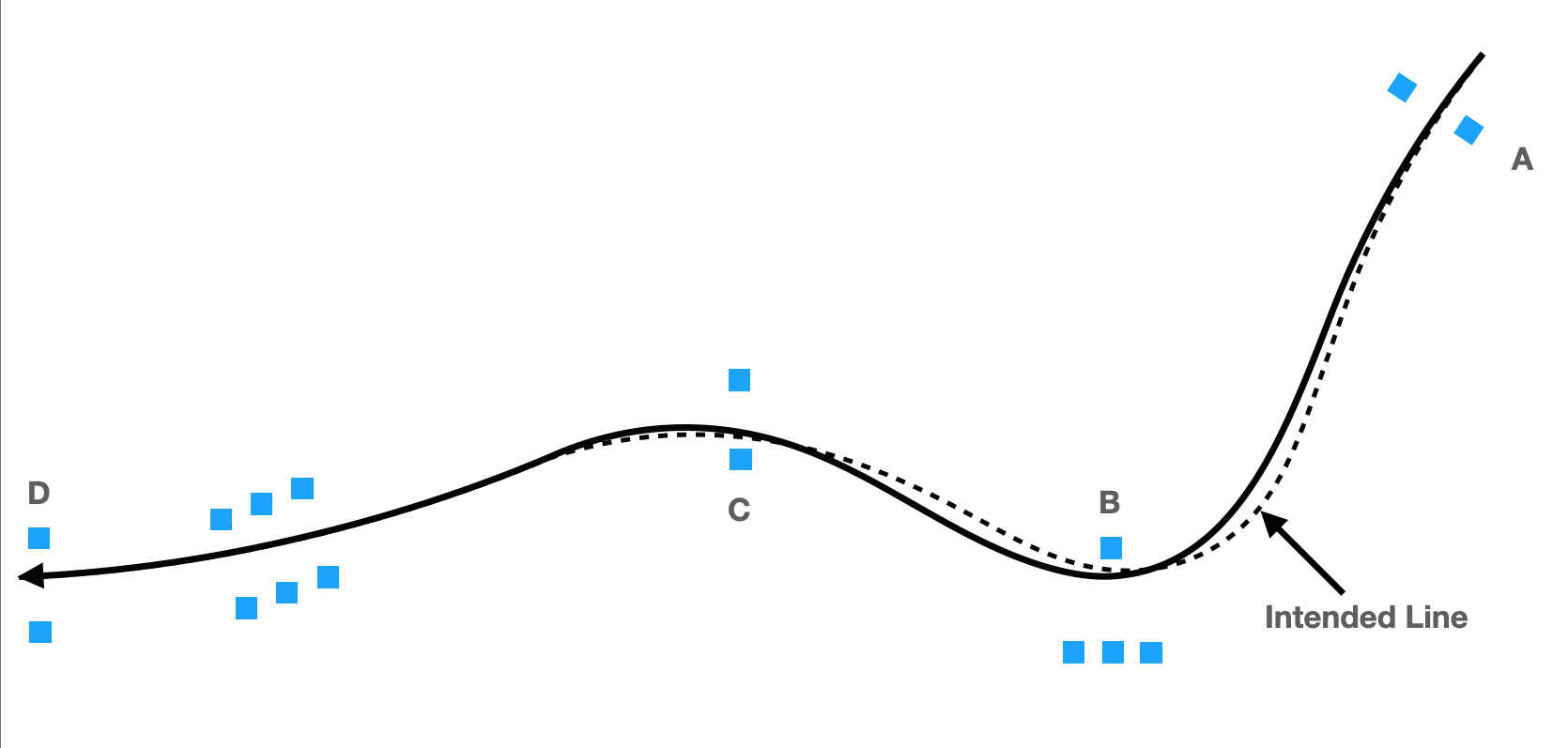
Figure 1 shows the relevant section of the course. We enter at A, accelerating strongly, must brake hard and turn 90 degrees to the right at B, then sweep through a gate at C, followed by a long acceleration zone through and even beyond the gate at D.
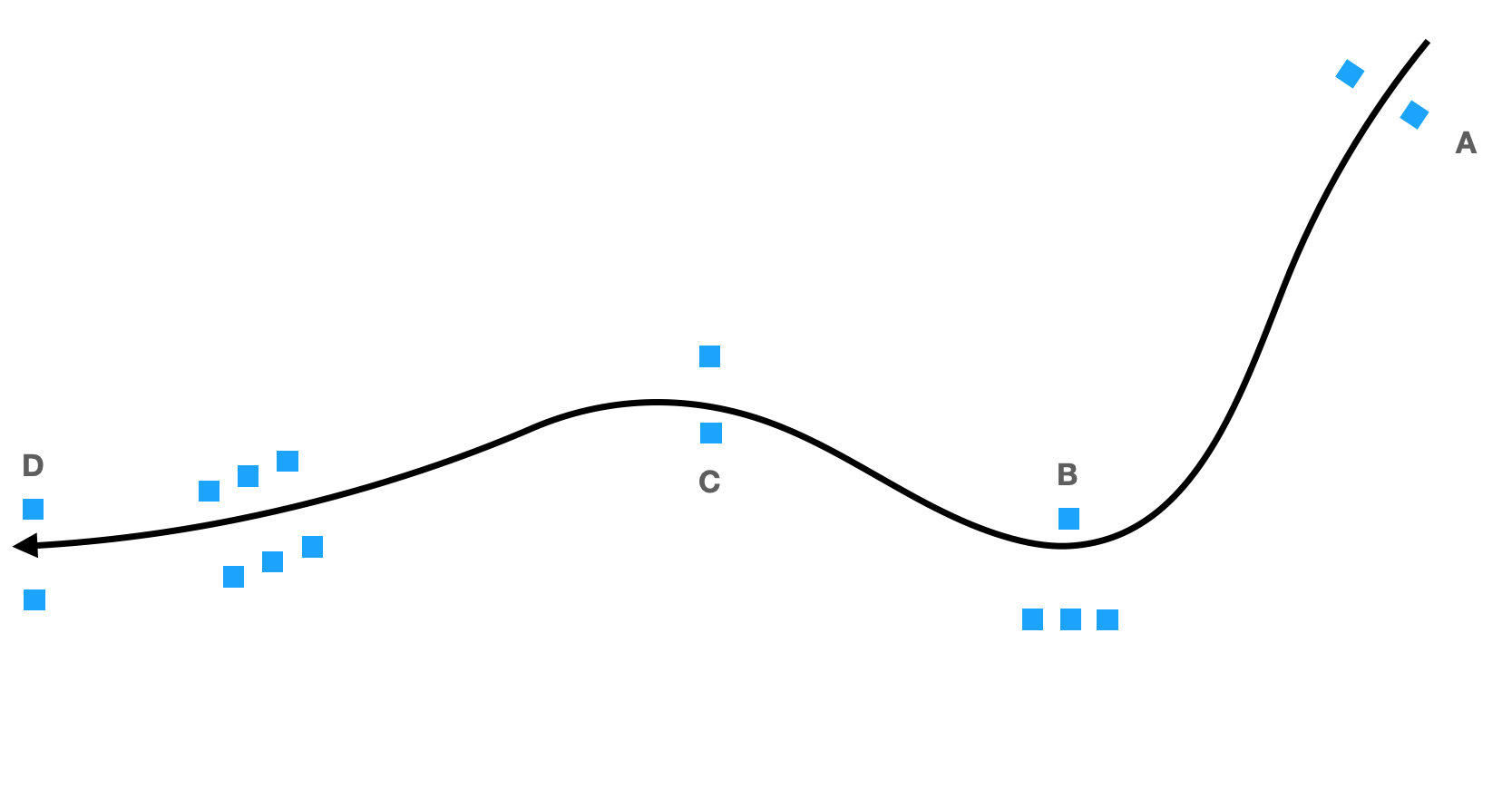
The corner at B contains the key questions: Where is the entry, apex and exit? As I’ve drawn it in Figure 1 it may seem straightforward. It’s basically a symmetrical entry and exit, right? The cone at B is the apex, i.e. the slowest point. As we approach C there will be either a braking or lift point allowing us to apex at C and then accelerate out.
After a run I realized that this was not optimum.
Figure 2 shows the same cones with two actual car paths from GPS data. Red is me, Blue is my co-driver.
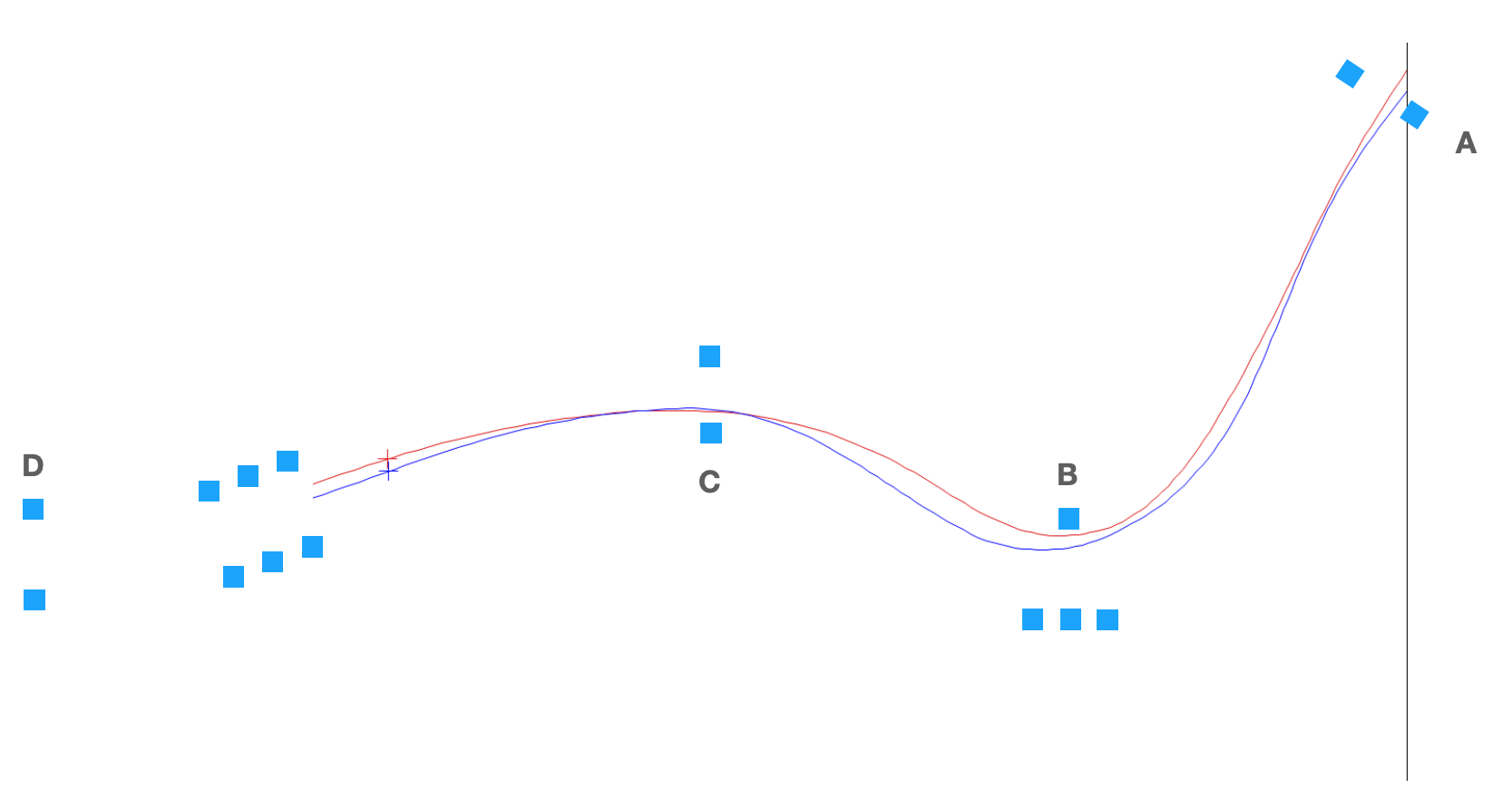
Neither one of these paths is perfect, by any means. For instance, I think my Red path should have gone out wider on entry similar to Blue. (I think I did go wider on other runs.) But, after cone B, Blue has a problem that allows Red to be Saving major Time. Do you see the problem?
Maybe I should ask instead, do you see the advantage of the red path? Or at least suspect what it might be? When I show you the data I think it will become clear.
Let me tell you my thought process. What I told myself was that I needed to move the corner at B earlier. I wanted to make the cone at B more of an exit cone, not an apex cone. Even though this would require me to brake earlier as I approached cone B the advantage would be that, partially because B was a relatively slow corner, I could accelerate beyond B without ever lifting for the gate at C. I hoped that this would increase my average speed from B to D and beyond, allow me to traverse that section in less time and make up for the initial loss caused by braking earlier. I didn’t intend to change the shape of the corner at all. I only wanted to move it earlier. I wanted to move it to the right as compared to what’s shown in Figure 1.
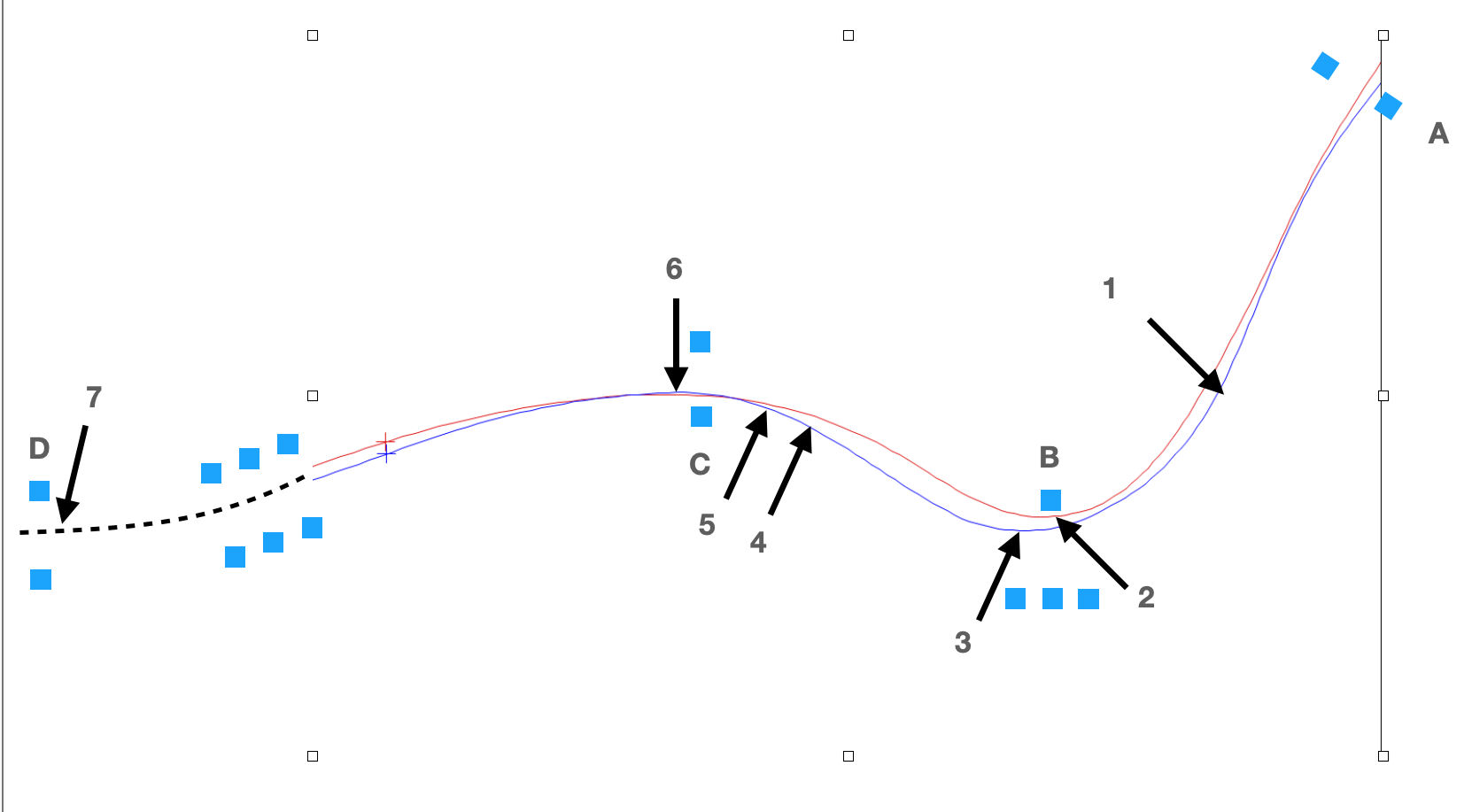
Figure 3 shows the data with reference numbered locations and Figure 4 shows the numbered locations on the paths.
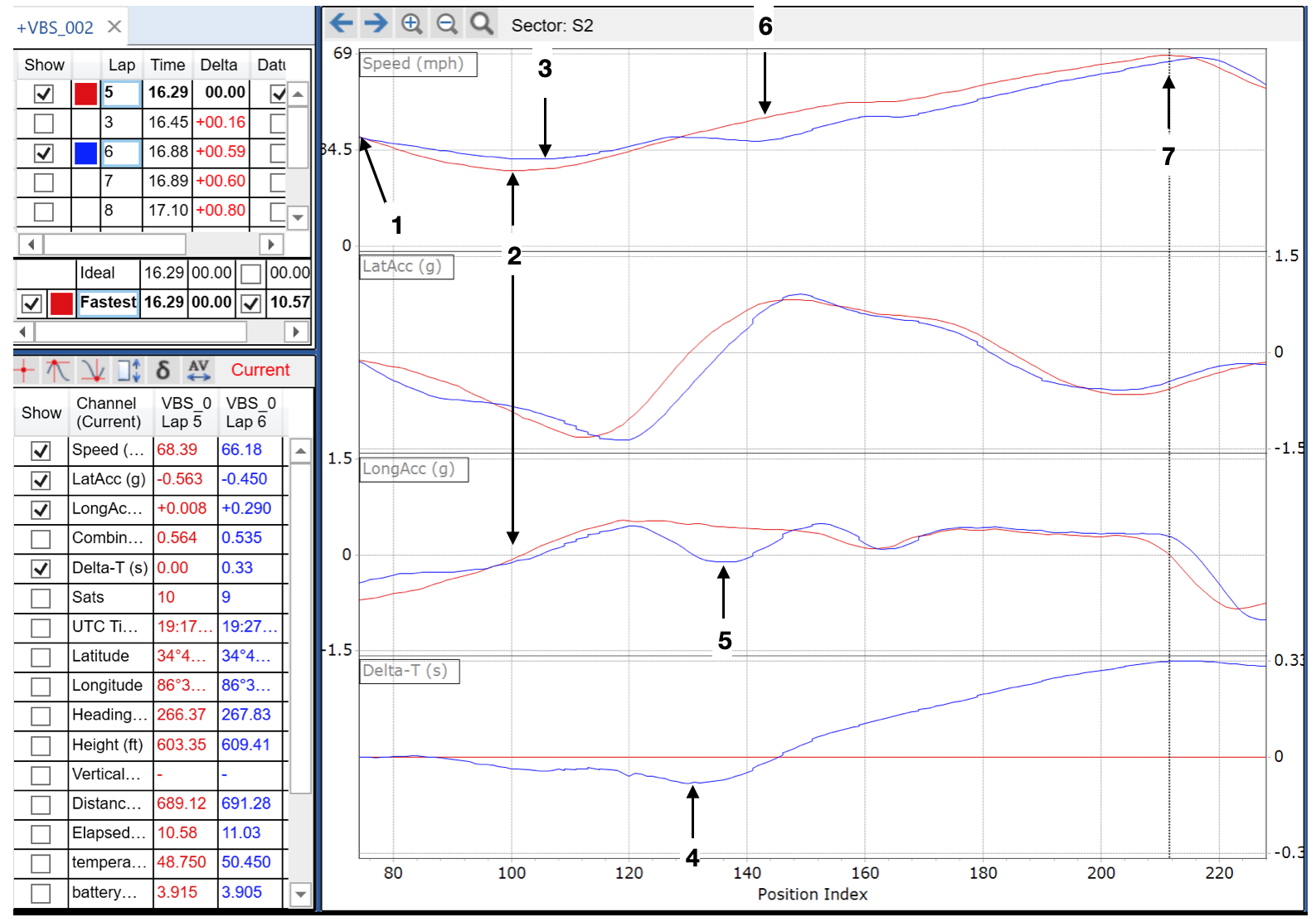
At 1 both cars are traveling at exactly the same speed. Blue has correctly gone a little wider. Red is braking harder and will slow more than blue.
At 2 Red reaches his minimum speed point. This is his apex. Blue reaches his minimum speed point at 3, slightly further along and definitely after cone B. Therefore Red gets back on the gas earliest, but this is not very important in this case and not the reason for the large gain Red will eventually get. Red is slower than Blue by 3mph (mostly because he didn’t enter wide enough) and losing time until 4, at which point Blue has taken a 0.10s lead.
The problem Blue has is even before 4 when he must lift off the throttle in order to negotiate C gate. The drop in Longitudinal Acceleration is down to zero at 5 while Red maintains strong acceleration. Blue has been forced to approach the gate at C at a very different angle than Red because he chose to carry more speed around B. After 4 Red starts to gain as seen by Blue’s Delta-T trace angling sharply upward.
[Note: please ignore the cursor marks between 6 and 7 in Figure 4. They are not at the cursor location in Figure 3.]
Mostly by virtue of Blue having to lift at 4, Red is 8mph faster by 6. He maintains a speed advantage all the way until the next braking point at 7. At 7 Red has turned the earlier 0.10s deficit into a 0.33s gain. So, Red gave up 0.10s to gain 0.43s by moving the corner.
Did Red succeed in making the cone at B an exit cone? Not really. The data is clear that I was only able to make it the apex cone while Blue (and many others) created an apex further beyond cone B. What I intended is shown as the dashed path in Figure 5, below.
I’m not completely clear on why we as autocrossers do this so often, i.e. our slowest point is beyond where the theoretical apex location should be. I wanted to move the apex earlier than B, but I didn’t do it! At least not on this run. I did succeed in achieving the main goal, which was to not have to lift to get through the gate at C, in fact I was at full throttle in 2nd gear, but I had to slow too much rounding B, which probably hurt the total gain.
I see this phenomenon in myself and others over and over again, event after event, local and national. Do many of us just lack discipline? What’s our problem? If you have any thoughts on why this should be, or if you think I’m not seeing it correctly, please let me know in the comments.
By the way: We each got 4 runs that afternoon. My co-driver did this section with a lift on the approach to C all four runs. The blue run shown was by far the fastest of the four. Of my four runs, I did a partial lift once and stayed in the gas three times. The red run shown was the fastest but very similar to the two other no-lift runs. The lifted run was by far the slowest.

I suspect you see this often because in a high speed braking zone like the one in this diagram you are attempting to do three things at once and due to the physical limitations of the human brain you’re probably only going to accomplish two of them (in no particular order):
1. Slow the car enough to make the corner.
2. Turn the car outside to widen the corner.
3. Identify the next element.
#2 is very difficult to force yourself into in a short braking zone because it’s intuitive to brake in a straight line and then execute your turns since it simplifies your calculations. We also all know instinctively that if we’re turning when we try to brake we have much less control over the car. In order to pull this off you would have needed to take the line in blue but brake as much as the line in red. All of that happening in the span of just a few tenths of a second. #3 is vital or you will just drive the fastest you can around element B.
We can further complicate this mess by adding in some of the steps our brain is going through (keeping in mind these can happen in a fairly jumbled order aside from the obvious such as #3 and #5):
1. Aim the car towards our desired corner entry.
2. Visually identify a braking point.
3. Begin braking.
4. Visually identify the corner apex.
5. Visually/physically (my butt feels like I’m going slow enough to make this corner) identify the end of the braking point.
6. Stop braking.
7. Determine steering angle necessary to make corner.
8. Set steering angle and begin cornering.
9. Determine acceleration point.
10. Begin accelerating.
11. Identify next element.
12. Repeat 1-11.
If you mess up any one of these you’ve missed your optimum corner and you’re doing this 30-60 times a course. Plus we know from decades of experience that many elements are interconnected to each other as you’ve shown with elements B, C, and D. That adds more decisions into the mix as we need to process the repercussions of our choices with the current element.
LikeLike