In planning a test program for Silver Ghost’s next event (which was today) I discovered a problem. I made a mistake when specifying force values for the Penske shocks.
It’s a little hard to explain, but I’ll try. I did the force calculations for 3in/s shaft velocity. Then I instead told Penske to put the knees at 2.5in/s +/- 0.5 in/s. Well, Penske put the knees more or less right where I said, at 2.5in/s, and they hit the force targets for 3in/s accurately with the adjustments at a particular setting. This means I have 20% too much force at 2.5in/s at the nominal adjustment settings. (3/2.5 = 1.2)
So, instead of having 90%Critical damping at 2.5 in/s I actually have 108%Critical. The shocks are stiffer at the nominal setting than anticipated. This is what has caused no end of issues with grip and balance as it turns out that for my car, at least, 108% of Critical is definitely too much damping for best grip on a bumpy site.
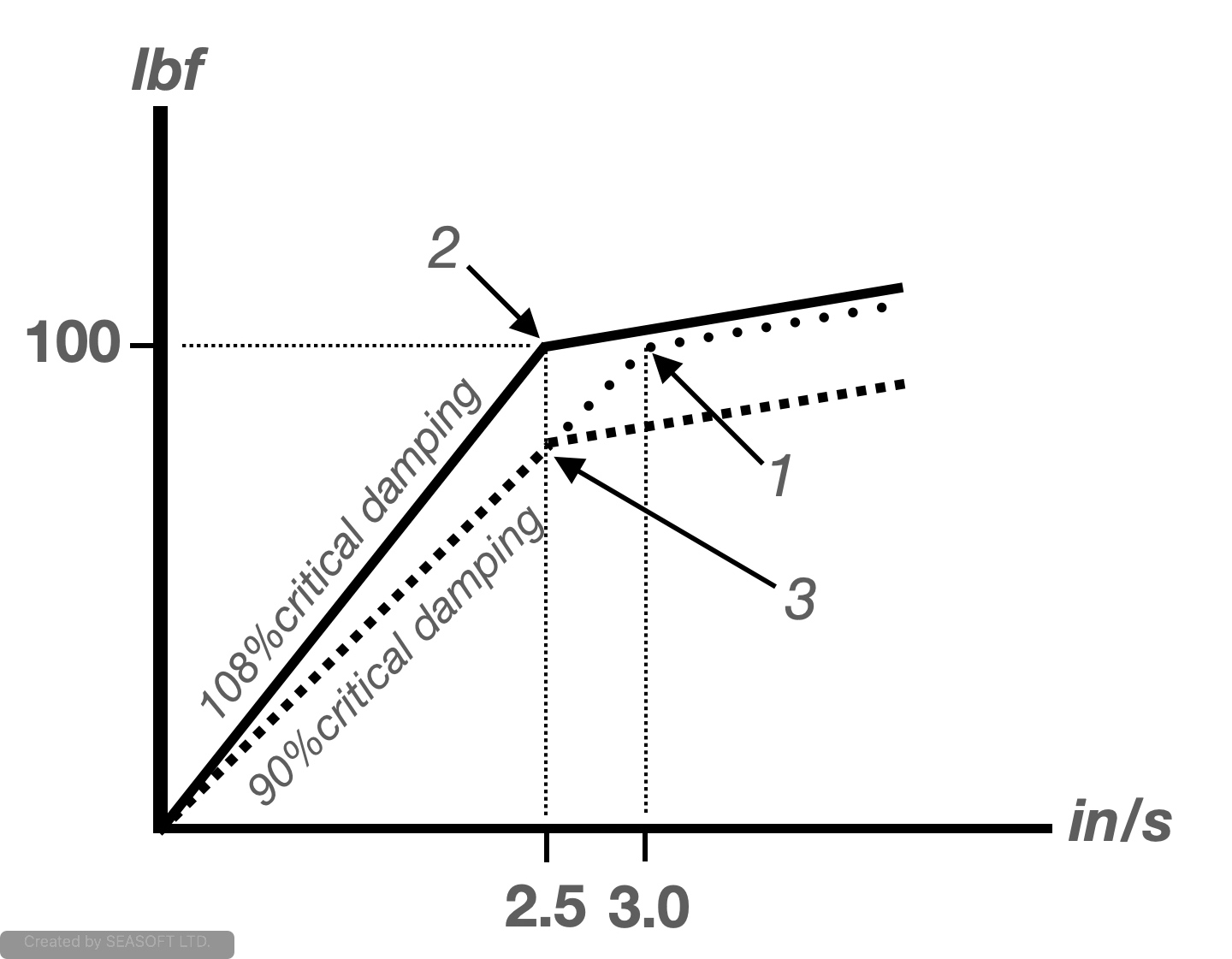
Here’s how I screwed up, explained with the chart above.
I calculated a force at 3 in/s, let’s say it was 100lbf. (100lbf is not far from the real number on my front shocks in bump.) That’s point 1 in the chart. (These numbered point are called “knees” in the shock dyno curve.) I asked for as linear an increase as possible from zero to that point. In theory, that produces the line I’ve labeled “90%critical damping.” The force at every velocity along that line represents 90%critical damping. I did exactly the same thing for rebound.
But, when I wrote the spec, I changed that point to be at 2.5in/s, that’s point 2, and I forgot to recalculate the force for 2.5in/s. So, Penske gave me point 2, which is 100lbf at 2.5 in/s. See how the line from zero to point 2 has a steeper slope? Every point on that line turned out to represent about 108%critical damping.
What I really wanted was the line that leads from zero to point 3, which is a lesser amount of force at 2.5in/s and would lie on the original 90%critical damping line.
Also, you may notice that to the right of point 1 the almost horizontal line is significantly above the sloping line to the right of point 3. This means that for sharp bumps, which produce higher shaft velocities, the forces are also higher than they need to be. At those higher shaft velocities we want less force, not more, to give us grip over bumps. That’s why we want highly digressive shock pistons. Beyond the knee the slopes “digress” to lesser angles. A horizontal line would be best, but is not achievable.
Before today’s local event I took the dyno charts and figured out what settings, front and rear, would get me back onto the 90% line and also knock down the slope of the line after the knee. I had to put bump at full soft and then reduce rebound until the total got me back on the 90% line. Then I dropped the rebound even more, down until it was equal in magnitude to bump (I didn’t want rebound to go under bump) and found that at that point I was at 83%Critical. All these numbers are approximate, by the way. What I’ve drawn in the figure above is a very simplified, idealized representation of what are really much more complex curves. To get the shocks to be really what I wanted, with some adjustment in either direction, I’ll have to have them revalved. (Maybe next year.)
That’s where we started today, at 83% with bump forces roughly equal to rebound forces, i.e. a 1 to 1 ratio. The car was soooo much better! Grip was high and it didn’t push at all, using exactly the same tire pressures on exactly the same surface that was so difficult to run on two weeks ago and again one week ago at Peru. I was near the top of Pro class, much closer to the two or three really fast guys than I was 2 weeks ago.
During the lunch break I adjusted the shocks to the new 90%critical settings. I got a little push from the front tires and little more bounciness over the bumps. In the end my co-driver and I decided we liked the 83% setting on the front with the 90% setting on the rear, along with some tire pressure changes that we also tested today. That’s what we’ll use at Bristol, which is a bumpy asphalt site like our local site.
