I have a simple goal for the near future: do better at Dixie Tour, the first National Tour event of the year.
I’ve always done poorly at that event, held for many years at South Georgia Motorsports Park near lovely Adel, GA. I think at least part of the problem has been the site: it’s a long, thin parking lot. As a result, the courses have been similar, transient-heavy things. Wiggle your way to one end, turn around and wiggle it back. Almost a constant speed. Not much of anywhere to use much power. Not especially good for a Corvette against S2000s and MSR Miatas. In fact, in 2012 Jadrice Toussant won B-Stock in an S2000 with a time that would have been 3rd in Super Stock. He beat every Lotus, every GT3 and every Z06 except for Strano and Braun. Now, Jadrice is a heck of a driver and National Champ and he flat tore it up that day, but I think the course had something to do with it.
Here’s what it looks like. You can even see some tire marks.

South Georgia Motorsports Park
So, the plan is to improve transient response. Mostly to see if I can do it and maybe do better at Dixie.
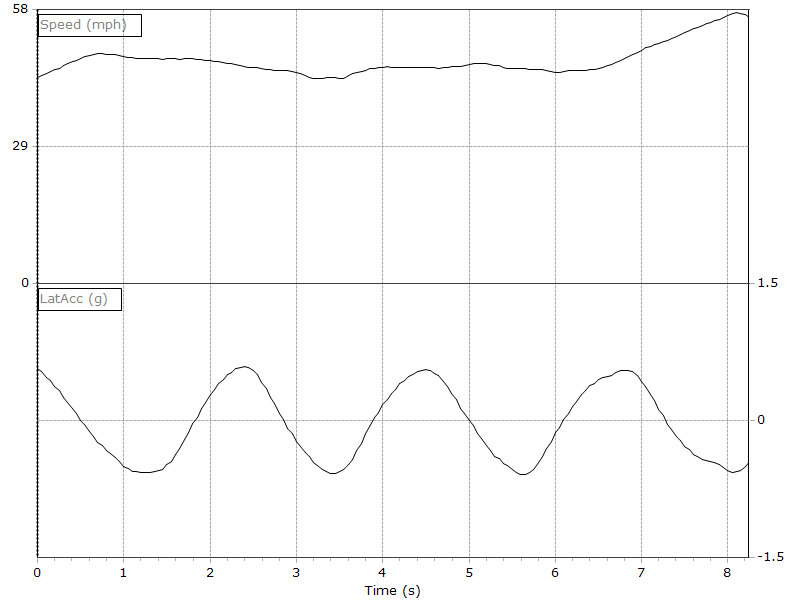
Two years ago I concentrated on maximizing lateral grip. Then last year I got some better shocks that I’d hoped would improve transient response via higher low-shaft-speed compression damping, but I was still focused on lateral grip. It worked to some extent, but not enough to place in the top 3 in class at Dixie. ( I was a miserably slow 4th.)
Before I start making changes, I figure I should review what I think I know about what happens when you turn a car and what factors control the transient response. So, I tried to write it down. (You’ll note that I like to start an analysis at the very beginning.) I focus on the front of the car.
- Turn the steering wheel. (We all do this pretty well, I guess.)
- The tires turn to an angle with respect to the car direction.
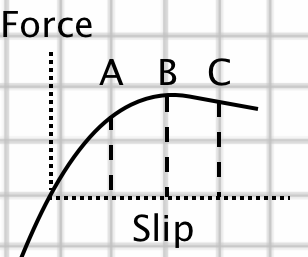
- Due to friction provide by gravity and proportional to the weight on the tires, the tire contact patches deform and twist, producing slip angles and lateral forces at each contact patch.
- Tire patch lateral forces transfer to and act on the sprung and unsprung forward masses and do two things: change the direction of the front of the car by creating a lateral acceleration, and create lateral weight transfer.
- Lateral force acting at the unsprung mass CG acts to instantaneously create weight transfer (like on a kart) and tends to reduce the ultimate lateral acceleration possible as weight is transferred from inside tire to outside tire, reducing the total contribution of all the tires added together.
- Lateral force acting on the sprung mass through the roll center rolls the sprung mass on the springs and bars to create (what Dennis Grant calls) elastic weight transfer, neglecting any small lateral translation of the CG. (I’m going to simplify things and neglect jacking force, or Geometric weight transfer, again per Dennis Grant, as it is small in the Corvette because the roll center is close to the ground.) The amount of roll does not affect the [total] amount of weight transfer. Update: I think I wasn’t clear, as Mr. Glagola has pointed out. What I mean is, the total amount of weight transfer is not dependent upon roll stiffness. Yes, the weight transfer build-up is proportional to roll angle, but that is because both the roll angle and the weight transfer are proportional to lateral acceleration. When the car gets to it’s final roll angle, whether it be 1 degree or 15 degrees, weight transfer is complete.
- Compression damping turns part of the sprung mass roll, during the roll transient, into increased downward force on the outside tire contact patch. This temporarily increases the lateral force capability of that tire. (It also turns some of this roll energy into heat, which leaves the system, so it never gets into the springs or bars.) This is why high levels of low-shaft-speed compression damping assists transient response. It acts as if the spring temporarily got stiffer. At the extreme it would allow the outside spring to compress only very slowly. In a slalom, with enough compression damping, very little roll might have time to actually occur before the car is asked to change direction again.
- Rebound damping on the inside wheel also resists sprung mass roll during the roll transient and once again some energy is turned into heat. The rebound force tends to hold back the roll of the sprung mass. To do this it picks up weight from the inside tire and tire patch, which tends to decrease the lateral turning force produced by that tire. In the extreme case the tire might leave the ground as the body rolls and the wheel follows. (I don’t think any shocks have that much rebound damping, but it could be done. If you were an idiot. Or an engineer trying to prove a point. Or some mixture of both, as is the usual case.)
- Roll of the sprung mass extends the inside spring, thus reducing the load on the inside tire. Roll compresses the outside springs, increasing the load on the outside tires. Without shocks, achieving maximum cornering force is delayed until the sprung mass roll is complete, if for no other reason because the outside tire doesn’t get to it’s final, proper camber until then. By resisting roll both rebound and compression damping forces speed up weight transfer across the front axle, getting the car into a cornering attitude faster and with slower roll, and thus less total roll during the transient. In this way, we don’t have to wait for the sprung mass to roll to it’s maximum before achieving high lateral cornering forces, though reaching the maximum cornering force is probably not going to happen. I suspect this will increase the maximum achievable cornering force when time is short, such as in a slalom. However, almost all of the increased energy in the compressed spring will be delivered back into the sprung mass when the turn is reversed, helping to roll the car the other way. The shocks absorb some of this energy in both rebound and compression, turning it into heat, and thus assist in keeping the car controllable during repeated maneuvers.
- All roll twists the front sway bar. Like the springs, most of the energy absorbed by the sway bar is given back when the car is turned the other way. Therefore, during transient maneuvers the energy put into the bar during whatever roll occurs wants to come right back out and roll the car the other way. Once again, shock rebound and compression damping absorbs some of the energy, keeping the car from rolling uncontrollably during repeated maneuvers. (Unless you are a certain production SUV and fail the Scandinavian Moose Test.) By limiting maximum roll, and thus camber loss, the sway bar may increase maximum lateral G forces in a sweeper by keeping all tires working better than otherwise. The sway bar also slows the rate of roll, assisting transient response. [However, the sway bar, unlike the springs, acts across the car to create an increase in the total weight transferred from the inside to the outside, which tends to decrease total lateral G capability.] Update: I now believe the statement in brackets to be false. In softly sprung production cars it is almost always better to limit camber loss by limiting roll with stiff sway bar(s). However, it may be that during the roll transient of a production car (with soft springs) it may be better to trade sway bar stiffness for an increase in shock damping, especially compression damping, in order to limit weight pulled off the inside tire.
So, based on this assuredly imperfect understanding of what happens when a car turns, I’ve come up with an action plan:
- Choose a tire known for it’s lateral stiffness. The RE71R is known to be one of the stiffest & most responsive. That’s what I’ve been running.
- Properly support the tire with a wide-enough wheel. I’m down from an oversized 275mm to a less-oversized 265mm this year on the required 8.5” wide front wheel.
- Increase support to the tire with air pressure. The past two years I found a relatively low pressure was needed to maximize lateral grip in sweepers. This year I will test using higher pressure in front to maximize tire support and hopefully produce faster transient response at the contact patch.
- Keep using significant toe-out on the front tires to more rapidly establish a bigger slip-angle on what will be the inside tire in the turn. This worked well last year. This allows the inside tire to more quickly create a lateral force, pulling the front end of the car into the turn. As the weight shifts to the outside tire, it has now developed a good slip angle and can really drive the front end into the turn. Because of weight shift, the inside tire is of lesser importance by then. I reset the toe before driving home after out-of-town events. The poorer front-end response with no toe-out is palpable.
- Test using the softer setting on the front anti-sway bar. The final roll angle may be less important because the final roll angle will not be reached in a slalom situation. I used the stiffer setting last year on a stiff bar to maintain proper camber of the tire during sweepers. For best transient response, it may be better to reduce the stiffness to reduce weight transfer off the inside tire. It may be possible to keep the inside tire working longer in the initial part of the turn. I will try to figure this out at an upcoming Test & Tune event. Update: As noted in an update above, the basis of this is false. So, I won’t be reducing roll bar stiffness, at least not for this reason. I might reduce roll bar stiffness for balance or stability reasons.
- Test with the shocks adjusted for higher front rebound and compression damping than used before.
Of course, all this may completely unbalance the car and I’ll be even slower than last year. I expect I’ll learn some things either way.