Most people rank three qualities in order of importance for an autocross car: 1) peak lateral grip, 2) transient response, and 3) power-to-weight ratio. Let’s talk now about transient response.
What we mean by transient response is how fast a car can change direction, that is, how quickly can turning be initiated or reversed. All forms of automobile racing value transient response, but probably none as highly as autocross. Does any other form of motor-racing regularly negotiate slaloms? The closest are probably the chicanes incorporated into road-race circuits for the purpose of slowing the cars. Here’s some data from my car in a long slalom at TAC/TVR #6 this past Sunday.
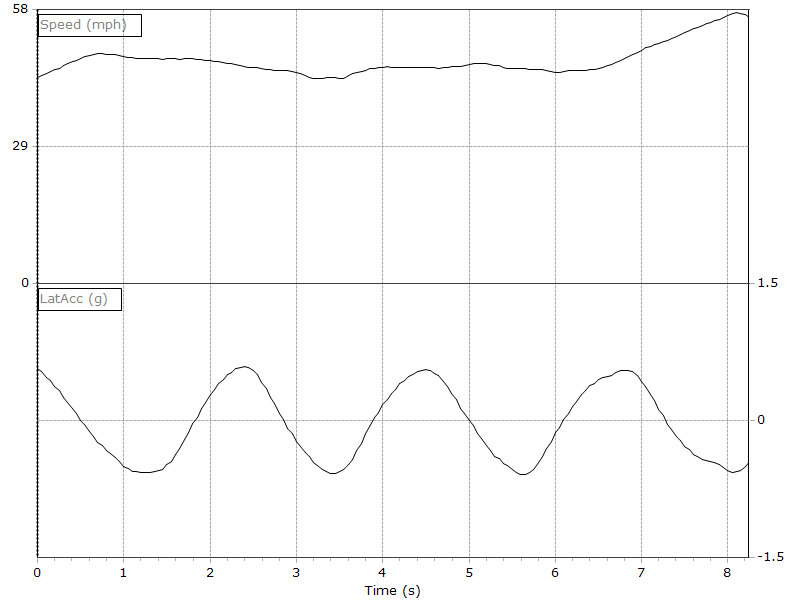
The top lin dog data is speed. Notice that it is constant at about 45 mph until I accelerate at the end. (You may also notice that I start accelerating even before the peak lat-g is reached. I “steal” a little cornering to do this, but it may also mean I was under-driving this slalom.) The lower data line is lateral G’s. They alternate plus and minus at about .58 G’s with a little over 1s peak to peak. The slope of the line between the peaks is a measure of how fast the car is transitioning from left to right… how fast it takes to get from max lateral G right to max lateral G left. The steeper the slope, the faster the transition.
What we’d really like would be perfectly vertical lines separating broad plateaus of max lateral G, as shown below.

How do we get closer to perfectly vertical lines? Also, if we could get to max lateral G faster, we’d get to both a higher maximum value and higher average velocity. As it was, the car did not have time to get to even 0.6 Gs lateral in the slalom before having to reverse, but the car regularly reached 1.1Gs on that lowish-grip surface on that day on longer corners. [Update: I now know that the data device I was using does not capture the lateral-G peaks in a slalom. The car was getting to more than 0.6G, but not all the way to 1.0G. EF 2020]
The first thing to remember is that if you want the car to transition quickly you must ask it. How do you do ask it? You turn the steering wheel fast! Fast hands shorten the transition from a larger radius to a smaller radius, or from turning left to turning right, by quickly establishing useful slip angles at both front tires, thus creating maximum lateral Gs as soon as possible. In theory, a slalom can be taken the fastest with alternating steady-state maximum lateral G turns with instantaneous reversals. The faster you turn the wheel, the more you mimic an instantaneous reversal.
However, the more over-steery the car, and the faster the steering ratio, the more you may have to limit your hand speed. It may also be valid to do like many top drivers: turn the wheel too fast and too far initially, intentionally causing excess rotation, then turn back to catch the oversteer, applying throttle to shift the weight to the rear and increase rear grip.
Besides fast hands, high roll stiffness is necessary to achieve a quick change of direction, which is one of the major advantages of stiff springs in autocross cars where the class rules allow it. How long it takes for the sprung mass to roll to its new attitude directly affects how fast a car can change direction. In classes where you cannot change the springs to increase roll stiffness some cars can use an extra-stiff front anti-sway bar allied with shocks valved to produce high levels of compression damping with a knee at low (1 to 2 in/s) shaft speeds and digress (blow off) at higher velocity. (The digression is necessary to keep the car from becoming unstable over sharp bumps at high speed.) The figure below is a dyno plot of my present shocks, showing average Force vs. Velocity. Notice the knee at 1 in/s in the compression data, which are the top half of the chart. (The bottom half is rebound. I have linear, not digressive behavior in rebound.)

The compression damping resists and slows the compression of the outside shock, thus limiting roll and speeding up weight transfer. This produces higher transient roll stiffness than otherwise. It has no effect on the maximum roll angle reached after the car takes a set because shocks only creating damping force when the shaft is moving. In a slalom the car may not have time to even reach the full roll angle, especially if the bump damping is high.
Rebound damping also helps turn-in by slowing the extension of the inside shock, thus again resisting roll and speeding weight transfer across the axle. However, the autocross car is limited in the usable level of rebound damping because, in excess, it hurts grip by binding up wheel motion. The effect is that the tire does not stay fully in contact with the pavement. Even on a substantially flat and smooth surface too much rebound can “pull” weight off the contact patch and reduce grip. For one thing, you are rockin’ & rollin’ out there, creating your own pitch and roll dynamics. Every pound of force a shock produces in rebound is obtained from the contact patch of that tire.
Let me repeat that, and put it in italics, because I’m not completely sure you really got it the first time and I haven’t seen it put quite this way before: All rebound forces developed by a shock absorber are achieved by reducing the load at the contact patch of that tire, which in turn reduces the grip available from that tire.
To an extent this is what we want when turning, because that pound of force also acts on the mass of the car to limit it’s upward motion at the shock for good transient response. When rebound damping is used to excessively control body motions we may regret it. For instance, when we try to turn after a ripple in the pavement we may find a momentary decrease in grip has exchanged our normally sharp turn-in for a half second of understeer.
Toe-out in the front can also speed turn-in by quickly creating slip-angle at the inside tire. This pulls the front into the corner even before any weight has shifted to the outside tire.

Ed, Do you have video that syncs to the graph? what I think I am seeing in your graph of the sign wave (lateral G’s) is that you are creeping the steering wheel into the turn and then stabbing the steering at the point where you get to the cone.
You stated that the car was not getting to .6gs …What is the GPS & data capture rate of your system, is it interpolating to get it’s numbers and thus missing the “real” numbers? The phone based systems I have looked at are relatively slow and do a lot of interpolation (averaging).
LikeLike
Alan, I have separate video. I’ll see if I can find it tonight. The data is 20hz gps. So each full slalom cycle is only about 22 points of actual data. Good for Gps, but not nearly the resolution of On-board accelerometers. I’m sure my slalom technique has issues as well
LikeLike