Long corners, as in an arc of more than 90 degrees, are more common in autocross than road-racing, but this is one case where the conventional wisdom is the same: approach on a tangent line, brake in a straight line to take the section at the maximum speed for the minimum radius and follow the minimum radius around the corner. Take a look at the figure below.

The typical construction in autocross is a gate that limits entry to some extent, a series of pointed cones set into an arc, more or less circular, followed by a shortish exit that leads to another turn.
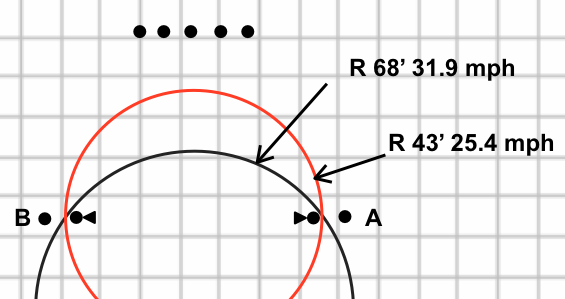
The classic way to take such a corner is shown by the solid line with straight-line braking starting at A in plenty of time to match the radius. If you misjudge the braking and go past the minimum radius you will definitely lose time. Better to let off the brake a little early than push out beyond the minimum radius. This is the way I was taught in Evo school.
What you definitely don’t want to do is shown by the dashed line. This is intended to illustrate a late-apex approach, except that instead of braking early in a straight line I’ve shown an attempt at combination turning and trail braking in the curve starting at C. Even so, the extra distance traveled and the slow speed necessary to negotiate the small radius before the exit will kill your time. There isn’t enough acceleration zone before the next feature to overcome the time lost in the late-apex corner.
Any other path that takes a larger radius than the minimum will also be slow, all else equal. See this blog post to understand why.
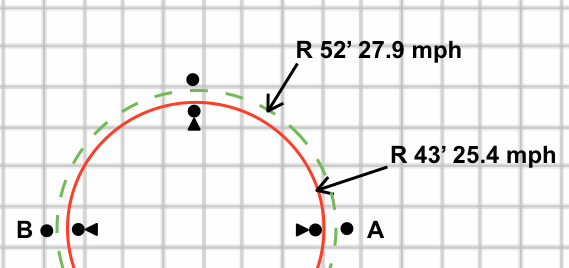
The dotted line is what I’ve gotten into the habit of doing and what I see some others do. I really don’t know if it is any better than the classic technique or not. It shows an attempt at delaying braking by initially going wide, then braking and turning into a slide that scrubs speed down to meet the minimum radius. Does it save any time on entry? The more I think about it the less I like it. Even if it does work in theory, time-wasting mistakes are very easy to make. I’d love to hear any good ideas on whether there is any chance this technique saves time. It’s a very complex and difficult situation to paper analyze.