In a recent post here we talked about saving time in 180 degree turn-arounds by taking the tightest possible circular path. I feel like I owe it to the reader to expand on that discussion as soon as possible because, really, it left out an important consideration.
Earlier this year I competed at the SCCA Georgia Match Tour in Moultrie. The results are here. That course had three 180-degree turn-arounds, all different, and only one of which was the situation discussed in the earlier post, i.e. with the entrance, exit and path tightly constrained. I want to talk about the first of those three turn-arounds because it was the opposite: both the entrance and the exit were wide open and the path from entry to exit was also unconstrained. That is, the driver was free to go wide on the entrance and go wide on the exit and as deep or shallow as desired. You’ll have to take my word for it that this was the case, because the ability to go wide depends not only on how the turn-around is constructed but also on the course design leading into and leading away from the turn-around. In any case, this is the kind of feature one finds on big, National-type courses.
The first turn-around at Moultrie was more like the following figure. You could take any path you wanted from the entrance to the exit, constrained only by a far-away boundary at the rear.
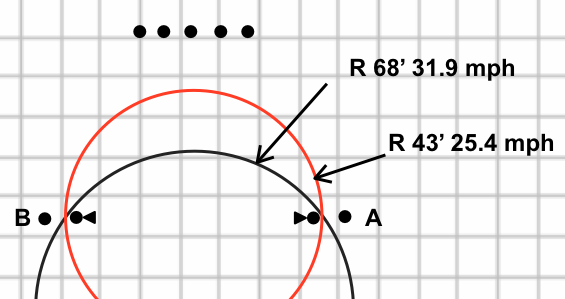
The red circle is the tight path discussed in the previous post. I didn’t mention it then, but that path takes 3.63 seconds from B to A if the car corners at 1G lateral. What if you enter wide and take the black circle path? That path has a radius of 68 feet. Neglecting for the moment what happens before B and after A, that path takes 2.0 seconds from B to A. Yeah, wow.
The black path is not only shorter from B to A, it’s much faster and that’s why I took it absolutely as wide as I could at Moultrie, as did most other folks.
Of course, that’s not the whole story. Going wide on the entrance costs time. I will stipulate (and you will have to give me the benefit of the doubt) that going wide on the exit did not cost any time, thanks to the higher velocity at the exit, which put the engine at a higher torque point, allowing faster acceleration beyond the exit, with plenty of time to maneuver for the next feature. In any case, let’s say going wide cost .63 seconds. It wasn’t nearly that much, but let’s assume it was. (For one thing, it means I didn’t have to brake as much because the path was going to be a faster one.) Even if it did cost .63 seconds, the wide (black) path still saves one full second over the red “tight” path.
Now we know why we go wide and shallow through almost every “corner” if we can.
