Recap from Part 1
To recap and clarify, I’m attempting to determine whether and how the proper radius around an offset cone changes with the acceleration capability of the car. The objective, as always in this blog, is to learn how to Save Time. A series of offset cones and the way I usually drive it looks like this:

Setup
The situation I’m modeling, with the aid of spreadsheet math and some graphical solutions, is an endless progression of offset cones with, theoretically, a 90 degree turn required at each cone. (In reality, the turns have to be more than 90 degrees.) The finish is not in play and I’m not discussing cornering techniques, per se. (If you want to see what I think about cornering techniques, see previous post All Those Books On Cornering are Wrong.) To be clear, what I’m going to show is NOT considered by me to be the best way to take a corner.
The figure below shows the area of analysis, namely the 150′ before any particular cone and 75′ after it:

I assume, for ease of calculation and graphics, that we go wide on the entry, brake down to the curve velocity the tires can handle, and execute the turn before reaching the cone. Sort of like back-siding the cones in a slalom. (This is simplified as compared to advanced cornering techniques, but I think it will be useful. And, best of all, I can calculate the heck out of it.) Once alongside the cone the car then accelerates at full and constant capability for 75 feet further. The specific area of analysis and various possible paths are shown in the next figure, repeated from Part 1:

Diagram of the Specific Area of Analysis
Calculations
I’m now going to discuss how the calculations are done. Those not interested can skip down to the results. Go on ahead. I won’t be offended.
First, I choose a radius for the turn. Given the 1.2G lateral capability assumed for all cars, physics sets the speed in the arc.
I graphically set the tangent point from the approach and determine the arc distance. Then I calculate the time spent in the curve, which is at a constant velocity. (All calculations use the standard equations of motion I learned a long time ago, forgot for many years and had to re-learn. Far as I know they haven’t changed too much.) From here I can go both forward and backward to determine the remaining segment times.
Since I know the speed in the curve and the acceleration capability of the car, I can easily calculate the time to accelerate through the 75 feet and the speed at the exit. So, yeah, I do that.
Here’s where I have to take the teensiest of short-cuts: I assume a constant entry speed, starting at A in the figure above, of 50 mph. The beauty of this is that now I can easily calculate the distance needed to slow the car from the set 50 mph down to the arc speed given a 1.0G braking capability. (If I don’t make the constant entry speed assumption, this gets too tough for my brain and my spreadsheet.) It’s then not hard to determine the time to cover that distance, figure out how far the car traveled at 50 mph and calculate that segment time as well. Add all the segments times together and you get the time from entry to exit, A to C.
Here’s a picture (probably unreadable) of the spreadsheet. In the upper right corner, in the red box, is the acceleration capability that can be varied. This shot shows 0.4 g. As it changes, the various columns of figures change. Each column starts with a different arc radius, from 5′ to 55′. All velocities are in feet per second in the spreadsheet.

Spreadsheet Data for 0.4G Acceleration Capability
There will be one number in the Total Time row near the bottom in the figure above that is a minimum. In this case, it’s 5.674 seconds and it corresponds to a 30′ arc radius, both values in red boxes. So, now I know that for a 0.4g car a 30′ radius is best, i.e. Saves The Most Time.
Results
I’ve worked the spreadsheet and the graphics from 0.1g to 0.6g and converted the velocities to miles per hour. The results are below.
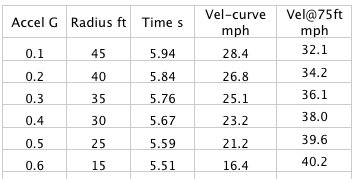
Best Corner Radii per Acceleration
Hmm. Take a look at those curve velocities. More on that in a sec.
Here is what the three radii, 25′, 35’and 45′ look like with 150′ from A to B:
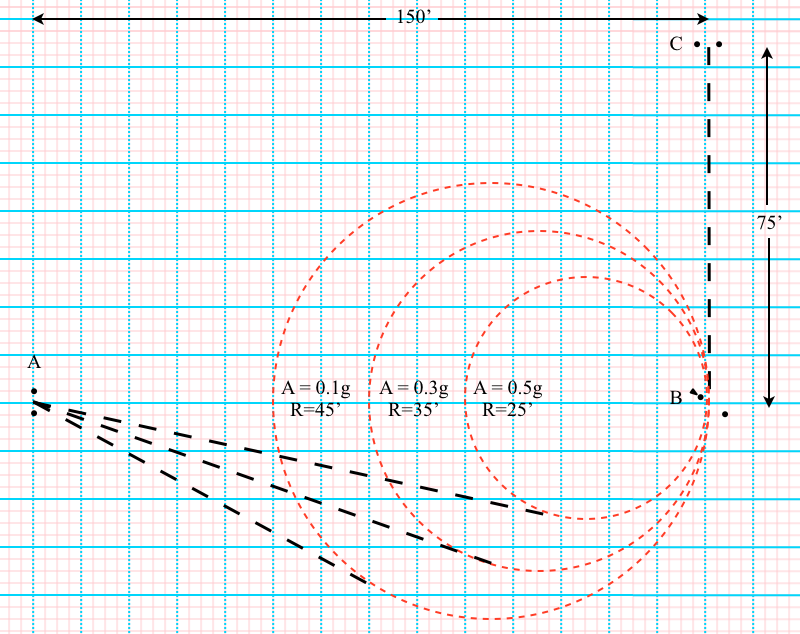
Example Result Paths
Conclusions
- Hey, the standard wisdom is right! The slower-accelerating the car the bigger the radius you should take. Holy Toledo Pro-Solo!
- I’m a little surprised by how big the radii are., i.e. how far outside the cone you have to aim. This says I’ve been driving too tight.
- I find it interesting that the time for a 0.2g HS econobox is not really that much slower than a 0.6g STU Corvette.
- Some of these radius speeds are really too low. The 0.6g car is only going 16.4 mph around the 15′ arc. Even for such a powerful car, in reality it will lose too much time trying to accelerate in 2nd gear from this speed. For most engines the RPM will be too low in 2nd gear. If we set a lower bound on the curve speed of 25 mph to keep from having to downshift this would limit almost all cars to no less than a 35′ radius. I almost never see people in powerful cars taking such big radii. What gives? Some factor I’m missing, maybe? Maybe a sliding, trail-braked, decreasing radius arc just looks a lot different and gives the impression of a tighter radius.
Sensitivity
One last thing: how sensitive is the data? What I mean is, how close to the theoretically right radius do you need to be? The answer is: not very. This is good news, especially for me and my driving!
If you take a look at the Spreadsheet Data for 0.4G figure, the time difference between the perfect radius of 30′ and plus or minus 5′ radius on either side is only 0.005 seconds either way. Given that, the difference in acceleration available at the cone from taking a bit larger radius than theoretically optimum could be significant. So, looks like it would always be better to go a little big. This means I’ve really been driving too tight. The difference in initial acceleration in my BS Corvette from between 21 mph and 25 mph is significant.
Whew! I’ve been working on the subject of these two posts for a long time. Glad it’s done. Please let me know if you find any errors.

So now, given the exit velocity at 75′ (and the fact that its not 50mph) what is the analysis of the next offset cone in succession? Does the optimum radius change?
LikeLike
In my spreadsheet, the result is somewhat dependent upon the entry speed because a lot of the total time is taken up in the 50 mph cruise before braking. (But, it does no good at all to leave it out.) In reality, it’s more complicated, therefore don’t take the given radius numbers as gospel. What this method leaves out is that a high-power car can enter at a higher speed than a low-power car by choosing a smaller corner radius, giving some extra straight-line acceleration distance before needing to brake. Too many variables for me to handle, however. I’ve set the entry speed medium-high at 50 mph to limit this effect. (I really need a full simulator. I’ve been told that CARSIM will do this.)
LikeLike
Slow in, fast out was what I was taught and that seems to be the case. Thanks for doing the calculations. Very interesting. On the other hand, most courses that I have run don’t have many places where there is that kind of corner.
LikeLike
At “A” in the “Diagram of the Specific Area of Analysis”, each case is pointing in different directions (up to 30 degrees holding my protractor up to the screen). Prior to “A” you would have had to do some extra turning which would likely slow your speed and thus affect your results. Right?
If you drew those arcs into your second figure, you would be driving more arc length in the previous turn, and the location of point “A” would be constantly changing. I’ll see if I can post a pic on a Facebook comment.
LikeLike
Whatever turning is required is not calculable and doesn’t bear on the question at hand. For any given course, it may or may not require extra turning to aim in one desired direction as compared to another. Which one of those directions should be penalized? No way to know.
If you mean that the bigger arcs always require more turning in the infinite case, yes, that’s true.
LikeLike
Hey Ed, interesting analysis. To your point, those mid-corner speeds are really low. Off the top of my head, there was one somewhat similar turn at the end of the Wilmington champ tour Saturday course. The RH sweeper before the super fast slalom into the finish. For my GS car, I back calculated the min radius based on speed and lateral acceleration. 89ft! (37.1mph &1.03 g from a RaceCapturePro).
I think the biggest things you are neglecting are the combined acceleration zones (trail braking and corner exit accel). Those allow the radius to be significantly larger while still cutting distance on the entry and only adding a slight amount on exit. Going back to the Wilmington turn, I only spent ~0.4s at 37mph in that corner. Prior to that I was trail braking and after, I was still turning with some amount of acceleration for the next 1.4s until the wheel was straight.
The other consideration that makes a large impact on the results is the amount of “straightaway” after the turn. I notice this going from small local lots to large, open national sites. Local events, distance is king. No need to try to carry another 1mph, just be a miser when it comes to distance. Toledo and Wilmington events? That super tight line ain’t so good anymore when there’s a 300ft straight section afterwards.
LikeLike
Josh,
Congrats on your trophy in GS at Wilmington!
You make a lot of good points. Doing an analysis that trades lateral and longitudinal G in real time is well beyond what I can analyze.
I remember that corner. I remember not being sure how to take it. I remember thinking about trying to shorten the distance, but you had to be set up correctly to enter that fast slalom, so I think I just swept around on the ‘natural’ arc.
One thing to remember is that I used a constant 1.2G lateral in the calculations, about what my car does (Corvettes sweep well!) and a little more than your car seems to be generating. So, if you drove your car at the proper radius (and I have no doubt that it was correct) then a 1.2G lateral car could drive significantly tighter at the same speed and if it also has better acceleration probably should drive a bunch tighter to save the most time.
At least that’s what I think the analysis is telling me.
LikeLike
Your acceleration calculation didn’t go high enough.
The Far North Racing Eagle Talon would accelerate at over 0.8G. Sustained lateral G was 1.35 but I could get instant peaks in the 1.7G range.
Turbo lag (there wasn’t much, but there was some) complicated the process slightly – you had to be on the throttle 7 tenths of a second before you wanted it. Thrust vectors from 4 tires modulated by 3 diffs also added some variability. But big hand, small map, you could drive at a cone, turn in early on an imaginary cone a few feet on the inside of the real one, slap the throttle open, and understeer would put you on the line you wanted, accelerating at 0.8G.
That’s where “drive diamonds” came from. I could cut off all the distance on entry and still had enough power and grip to retain the same (or better) exit speed than somebody who could only accelerate at 0.4G.
The crazy thing was that this was so different from all the other cars extant at the time – and so visually obvious from a spectator point of view – that most other drivers were on my case about my crappy driving. The minimum corner speeds were quite a bit lower than momentum-maintenance lines (as your analysis shows) so the spectator experience was “point and shoot”, “drag race from corner to corner” etc. Conventional wisdom was very much “If he ever learns to drive momentum maintenance and be smooth he’ll be really fast” – notwithstanding the considerable testing that had resulted in the “driving diamonds” technique in the first place.
So why didn’t I win every single race by a mile?
Two issues:
The first was that life happened *very* quickly in that car and there just wasn’t much time to react or recover from mistakes or otherwise running out of talent. This shows up in my ProSolo vs National Tour results, where the extra runs at Pros gave me more opportunity to stay ahead of the car for an entire run;
Secondly, one of the reasons why the car’s lateral G numbers were so good was that the car was really very wide. That gave it a wider than usual track which in turn reduced grip lost to lateral weight transfer. Wide is very good in sweeping turns, but it can be *punishing* in slaloms, where the maximum speed though the slalom section is largely determined by how far the car has to travel laterally to clear the cones. In longer, closer-spaced slalom sections the narrowest car wins – and the M3s that were the biggest competition at the time were on the order of *feet* narrower. This created a course design dependency, and sometimes you get the bear….
LikeLike