Update: Figure 3, 4 and 5 were added on 8/5/2020.
Here’s the proof for the statement I made in the earlier post: The fastest way through any infinite slalom is by crossing over mid-way between the cones. Any other strategy, i.e. being early or late, at any point, will be slower overall.
Let’s assume we are driving a car with infinite transient response, which means we drive through an infinite slalom on perfectly circular arcs. (It doesn’t really matter, but I drew the figure this way.) We can make our crossover either at the midpoint between cones, or before the midpoint (being early) or after the midpoint (being late.) Figure 1, below, shows the path crossing over at the midpoint.
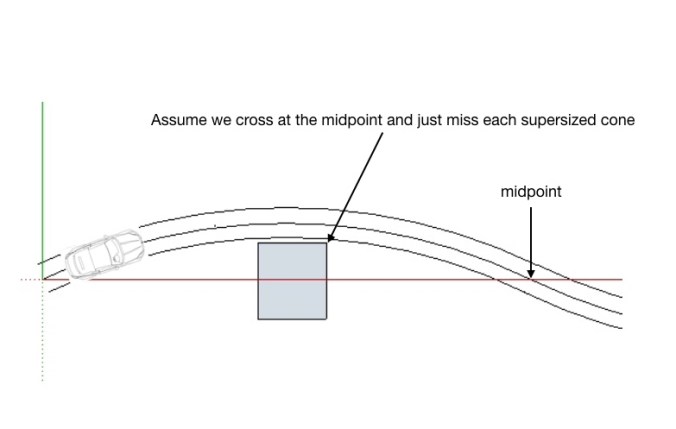
Figure 1- Infinite Slalom with Midpoint Crossover
For purposes of illustration I’ve drawn the cone supersized. The point is the same even if the cone is very small as compared to the track width of the car.
If we try to be early on the cone but use the same path then we get the situation shown below in Figure 2.
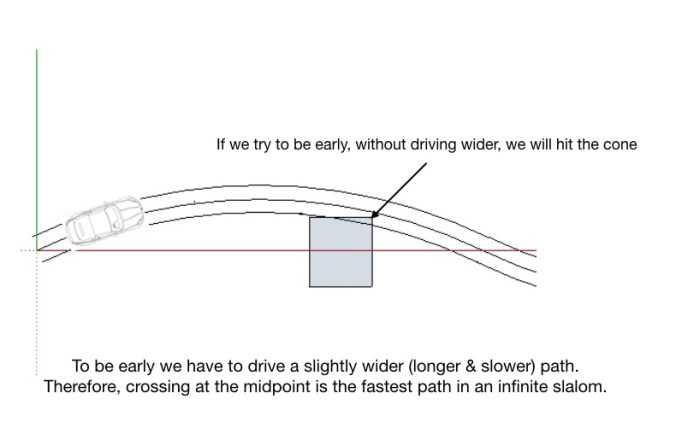
Figure 2- Crossing Early Before the Midpoint Between Cones in an Infinite Slalom
Do you see the problem? To be early we can no longer drive a path with the minimum lateral movement of the car. The car has to move farther laterally to miss the cone.
Let me show this with more realistic graphics. Take Figure 3, for instance.
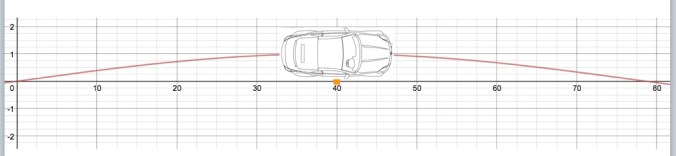
Figure 3
Here we are negotiating a slalom with 80′ between the cones. The car is following the red path, will cross exactly at the midpoint between the cones at the 80′ mark and just misses the orange cone at the 40′ mark with both front and rear tires.
What if we want to “backside” the orange cone and cross 20′ earlier. Then we have the situation in Figure 4.
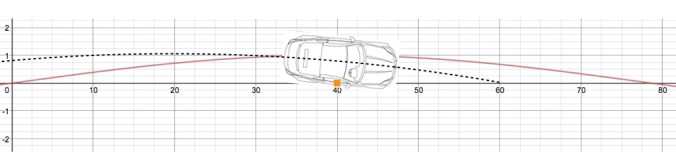
Figure 4
In Figure 4 the car is now following the dashed path and will cross at the 60′ mark. The dashed path is the same path as the solid path, just displaced to the left. But, there’s a problem: we run over the cone.
To prevent getting a 2 second penalty for displacing the cone we have to drive a different path, something like the dotted one in the Figure 5.
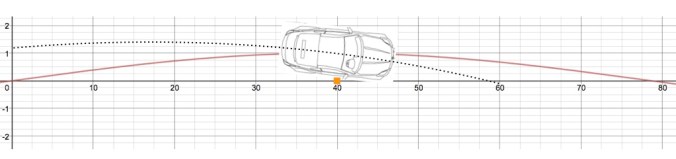
Figure 5
This path allows the car to cross early at the 60′ mark, only 1/4th the way to the next slalom cone. But, it requires the car to take a path that is wider laterally, i.e. farther from the slalom center line. That means it is longer. It will also probably have a smaller radius. A longer path with a smaller radius always means one thing: slow. Unless we do something different. That something different will be discussed in the next post.
Being late causes exactly the same problem. Most autocrossers think of getting late in a slalom as the kiss of death. We watch novices do it over and over again and shake our heads at how slow it makes them as the car slews sideways and slows terribly in the attempt to not hit the (usually) last cone in the slalom. But, are we really so smart being consistently early?
The above figures prove that any deviation from crossing at the midpoint has an associated time cost. So, when we think we have a good reason for not crossing at the midpoint it needs to Save More Time than it costs.

I may not have read all these posts so I trust you started by emphasizing the importance of pacing off the distance between cones on your first walk through to be sure the designer hasn’t thrown a trick into the slalom.
LikeLiked by 1 person
Cars turn around the diff. So it feels like you are turning early because when the diff is along side the cone the front of the car should already be turning past.
LikeLiked by 1 person