Additional charts and info has been added at the end.
Now I owe you the explanation for the statement: “The fastest way through any generic, non-infinite slalom is probably achieved by starting early and ending late.”*
I’ll try to illustrate the idea. Let’s assume we are negotiating an 80′ slalom, meaning 80′ between cones. It might look like Figure 1, below.
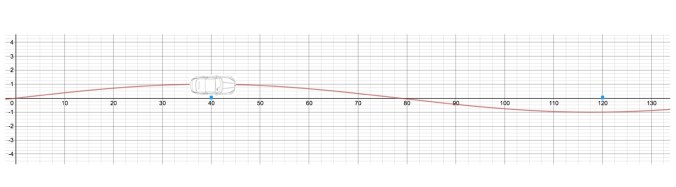
Figure 1- Car And Path In An 80′ Slalom
There are two little blue dots… those are the cones at 40′ and 120′, so 80′ apart. The path in the picture crosses at the 80′ mark, exactly half-way between the cones.
If the slalom is infinite, then trying to be early or getting late is the equivalent of shifting the path (and car) left or right with respect to the cones and results in hitting a cone as discussed in the previous post, Transient Response 6.1. So to be early or late you must alter the path. The different path could be one with more (wider) lateral movement or it could be one with smaller radius curves connecting straight sections. If you think about it for a while and maybe even draw it I think you will come to the conclusion that any of the possible alternate paths that would allow the car to be early will take at least a little bit more time than the perfect path that crosses exactly in the middle.
But, of course, infinite slaloms are rare. (That’s a joke.) More importantly, the entry and exit of non-infinite slaloms can take all sorts of forms. Let’s look at a fairly common non-infinite slalom as shown below in Figure 2.
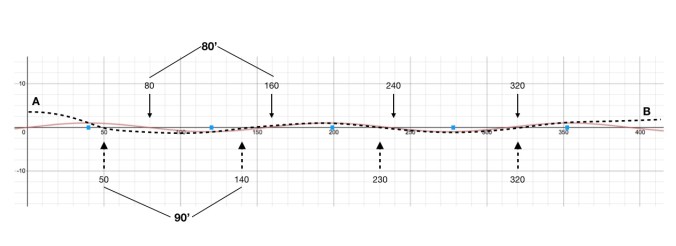
Figure 2- A Non-infinite (5-cone) Slalom With Same-Side Entry And Exit
Here’s the same 80′ slalom, showing 5 cones, with the same red line showing the infinite-slalom perfect path. But now let’s assume that we enter from point A and exit at point B.
We could enter from A and get on the red path and follow it faithfully to the end.
But, because of the entry location at point A something more interesting has become possible. We can be early on the first cone without losing anything. (Let’s assume that’s true, though it’s not really, quite, absolutely, positively true.) I’ve drawn a dashed line path that shows the cross between the first and second cone at 10′ from the first cone, which is the 50′ mark on the chart.
What if we now follow the dashed path and make our next crossing at 20′ beyond the second cone, at the 140′ location. And then the next crossing is at 30′ past the third cone and the crossing after that is 40′ beyond the fourth cone. Do you see what’s going on?
In the infinite slalom we cross every 80′. In the non-infinite slalom we cross every 90′ (or more.) Necessarily the non-infinite slalom path (dashed line) must have a bigger radius than the original path (red solid line.) Therefore, the car can travel faster through the slalom for the same lateral acceleration and transient response capability.
I know that many of you are saying that I’ve missed a key point, which is that we can start accelerating early to the exit, somewhere about the fourth cone. That’s true for almost all non-infinite slaloms (except ones where the course designer is really obtuse and prevents us from doing that via what comes next) and of course we can and should do this, but that’s not my point here. I assume you already know about accelerating early.
There’s a possible glitch, however. The dashed-line path cannot actually be a series of perfectly smooth and efficient curves, circular, sinusoidal, or otherwise. We still have to modify it somewhat to not hit the cones. There’s just no way to perfectly fit the path with 90′ nodes into an 80′ slalom without altering the path somewhat due to the finite size of the cone and the finite width and length of the car. A little bit of a wider line is required. How much this degrades the net result I don’t know.
In any case, I think that in many real-world situations the start-early and end-late path Saves Time but I recognize that I’ve certainly not proven it.
Rev A Addition
Maybe an easier way to think about this is to start with the 3-cone slalom, constructed as and known in some circles as the Chicago Box.
The figure below shows the situation with the infinite slalom driving line in red.
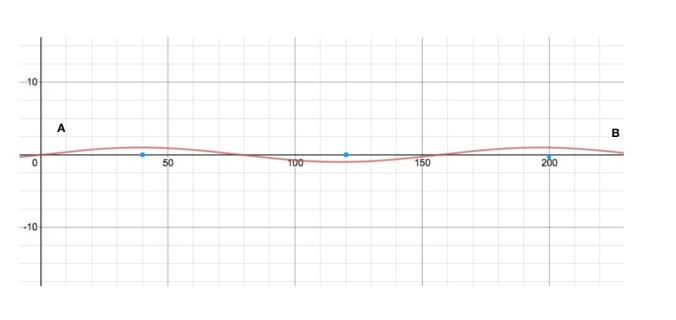
Figure 3- The 3-cone Slalom
If we were entering at A and exiting at B would we try to find the infinite slalom, midpoint-crossing driving line? I don’t think many people would. I think most everyone understands that the 3-cone slalom is a special case where we should enter as early as possible and exit as late as possible to produce the biggest radius path, as shown below.
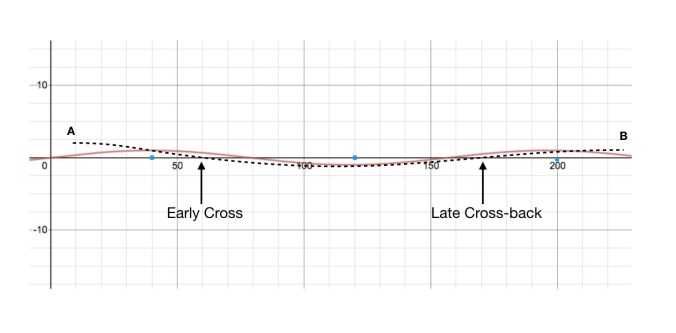
Figure 4- The Correct Path Thru The 3-Cone Slalom
We tend to treat the 3-cone slalom as a special case and it is. A special case of what? It’s a special case of the generic start-early and end-late path shown above in Figure 2.
Here’s another one, a 4-cone slalom, shown below.
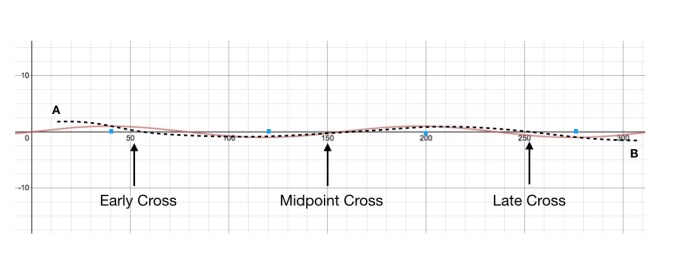
Figure 5- The 4-Cone Slalom
With a 4-cone slalom we necessarily enter on one side and exit on the other, but the principle is the same. We make the first cross as early as possible, make the 2nd cross at the midpoint between cones and make the third cross as late as possible. This creates a path with the maximum radius curves possible, which means the highest speed.
- *I must give credit to Steve Brolliar who teaches this start-early, end-late concept at our Advanced Autocross school each year. I hope I’m presenting his point faithfully.
