All you great autocrossers out there already know everything about what I call slithering. I know I’ll be preaching to my betters and you folks can stop reading right about here.
But, I got some good data last Saturday that doesn’t show anything about how to go fast and I wanted to share it with those who maybe don’t have a lot of autocross experience and those who maybe don’t have a lot of experience with data either. I want to share it because of what it doesn’t show. It’s a good example of the limitations of limited data. And I’ll also say something about how to be fast in a slalom that has little if anything to do with being early or late or how fast your car can change direction (Transient Response) or how hard it can corner.
I just completed a set of posts about transient response and a lot of it concerned slaloming. I was criticized by some for focusing only on the math and not how people really go fast through slaloms in the real world. Well, math has its place and I’ve always tried to put numbers to anything I can. I find people who criticize trying to put numbers to autocross, well, a little weird. Many couldn’t see the value in it. I guess I’ve done so much mining for meaning in data during my engineering career that I can’t relate well to those that haven’t.
This post, instead, concerns a real-world way of going faster through a slalom that I can’t put numbers to and seems not to come up in discussion as often as maybe it should. Lots of people learn it quickly, of course. I was sort of slow on the uptake. I remember trying to learn this about year five or so which is probably the equivalent of learning to walk when you’re a teenager.
The car I co-drove this past event was a C-Street Honda S2000 owned by someone just two years into the sport. I’ve got ten years in. The owner is much faster than I was at the two year mark. I barely managed a better time for the event.
The course began with a 5-cone slalom with an immediate turn around the 5th cone, so only a moderate ability to accelerate near the end. The data below begins just as the cars have turned around the first cone shortly after the start. Both cars are going identical speeds of 31.9 mph at the cursor location A. (The direction of travel is from A to C.) Both cars have already short-shifted to 2nd. I’m the red trace, my co-driver the blue. I’ve drawn in the approximate location of the five cones on the path trace. The Delta-T data trace begins at zero at the start of the data so the interval from the start to point A is not counted.
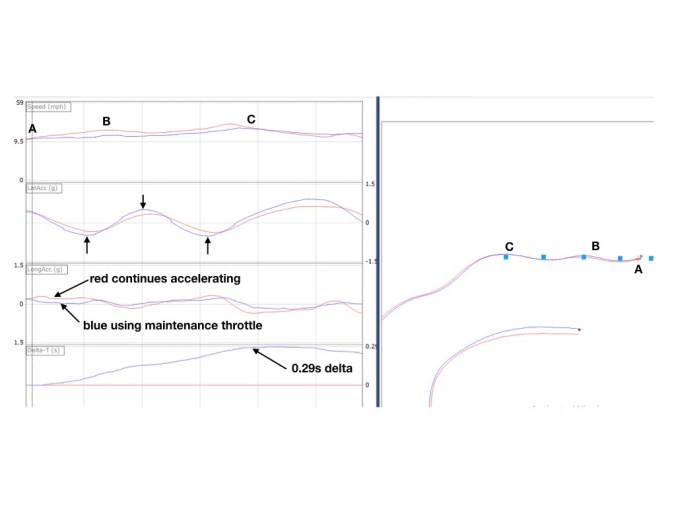
Figure 1- 5-cone Slalom Data
The first thing to note: by time we’re at B Red is 4 mph faster. Red maintains a speed advantage all the way to C, at which point Blue has lost 0.29s to Red, as you can see on the Delta-T trace.
Second, note that Blue is turning harder around each cone. I’ve marked the Blue peaks on the LatAcc trace with three little arrows. The Blue peaks are earlier and each about 0.15G higher than the Red peaks. (I know that my 20Hz GPS data is missing the actual value of these peaks but the relative differences should be real.) Does this seem a little strange to you? Strange that the faster car is pulling less G’s? It did to me.
The explanation could be that Red (me) was under driving the car as compared to the owner. I was under driving the car yet faster than the owner in the slaloms? Doubtful. Especially since the Red run shown in the data was my 6th. I think I was working the car pretty hard by then.
Thirdly, how Red got to a higher speed is clearly shown on the LongAcc trace where you can see Red continuing to accelerate into the first part of the slalom while Blue uses only maintenance throttle. Does this really explain anything? OK, yes, using more throttle makes the car go faster. Got it. But how the heck does Red go faster than Blue through the same slalom with the same car and pull less lateral G’s doing it?
You might think that Red must have been closer to the cones. That could be one explanation, but I think we were both quite close to the cones. I certainly didn’t notice any issue when I rode with my co-driver on three of his seven runs.
You might think that Blue could be driving bigger loops in between the cones even while being close to each cone when passing it. The GPS-derived path is probably not accurate enough to see such a small difference, especially with drift over time. It’s possible that this is part of the explanation, but not the complete explanation. I do remember trying to make my crossovers in the middle between the cones, as explained in this earlier post here. My co-driver was probably following the standard instructions to “backside” the slalom cones, at least in the beginning of the slalom. This would put Blue’s peaks earlier than Red and make him drive a wider path, if only very slightly.
[Edit: I just compared the zero lateral G crossover points in the data with respect to distance travelled. Red consistently crossed over between 5 feet and 10 feet later than Blue. So, my co-driver was backsiding the cones while I was crossing more toward the middle.]
The complete answer is down to slithering. By the end of the day I was comfortable enough with the car, its handling and its limits to slither it consistently. I don’t think the owner knows how. Not yet.
OK, so what exactly do I mean by slithering? It’s very simple. It means to a) speed up, b) turn in and aim at the cones as if you intend to hit them, and c) allow the car (by virtue of the higher speed) to drift both front and rear so that the front tire just misses the cone in question and the rear of the car rotates just enough (by sliding) to also miss the cone. Only the higher speed will show up in the limited data with limited resolution that I take and show above.
The rear of the car can’t step out too much or uncontrollably, of course, or disaster will occur. So, this requires a well-setup car that you can trust while repeatedly exceeding the peak cornering ability of the tires as you intentionally create controlled slides around each slalom or offset cone. The result is a straighter, faster path from cone to cone.
I remember the first time I became aware of slithering. I watched a slalom directly from the rear at Dixie Tour many years ago. Sam Strano’s Corvette looked like a lizard bending in the middle as it miraculously wrapped itself around each cone.
It was beautiful.
Another great example is from an earlier post here where Matthew Braun shows an even more sophisticated form of slithering while negotiating offsets than I’m describing.
I can slither most any “good-handling” RWD car given a few runs to get to know it and the surface. I suspect slithering a FWD car is more difficult because I see fewer people do it, but the top drivers do slither FWD. (I know nothing about driving FWD.)
Fast hands, good timing, entering early and leaving late… all these things will only carry you so far. I think you have to learn to slither to be really fast through a slalom.

I think I know what you mean by slithering thru slaloms. I too have scratched my head watching particular nationally competitive drivers go thru slaloms and wondered “How do they get the car to do that?” While you are calling slithering a driving technique, I’d always thought it was because an above-average skilled driver happened to find the sweet spot with slip angle (primarily thru toe-out) and compression damping. My reasoning for this? Particular cars (namely FWD and AWD) can be “slithered” by only by professional caliber drivers when they are in a particular state of tune. But if toe, compression damping and tire pressures are changed to a particular degree on the same car, suddenly an amateur autocrosser can slither the car fairly well. Top drivers can induce the slip angle needed (fast hands required) and any skilled driver can slither (and be faster) with a particular car set up.
LikeLike