So far what we’ve explored is well-trodden ground. That’s okay, we’re just getting our bearings within the late apex landscape.
Now I want to shift gears and look at what we’ve just done from the autocross standpoint. There may be discoveries to be made. Let’s start with Figure 4, below.
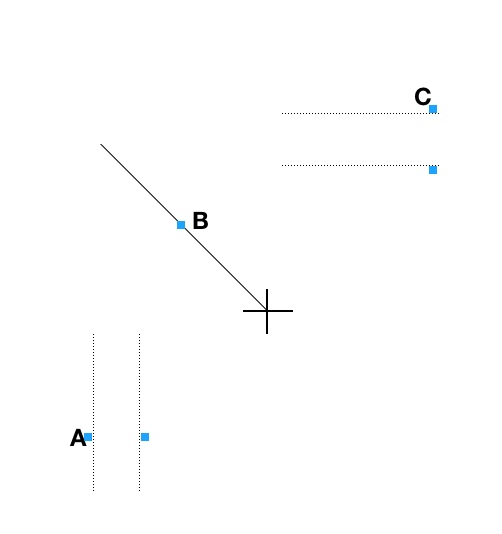
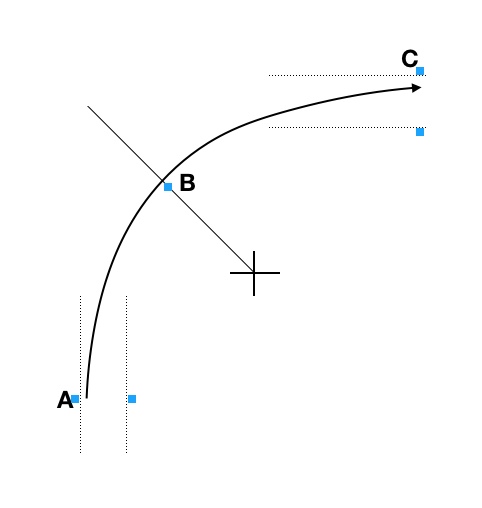
Here I’ve deleted the track edges and substituted a simple gate at the entry at point A, a single cone at the former geometric center apex at B and another 2-cone gate at the former track-out point C. I left in some dotted lines to indicate the former track edges, the crosshair that indicated the former inside edge arc center and the 45 degree line for reference. Now that we are free from the inside track edge the only limitation becomes the cone at B. (Yes, it would normally have a pointer cone on it. Please use your imagination!) So, how to get from A to B to C in the least amount of time and should it, or could it be any different than before?
Certainly our path could be different. For instance, a typical novice mistake is to head at top speed more or less directly toward the cone at B as shown below. We can do this because we can cross over what would have been the inside edge of a typical track corner and change the angle of the car at B.
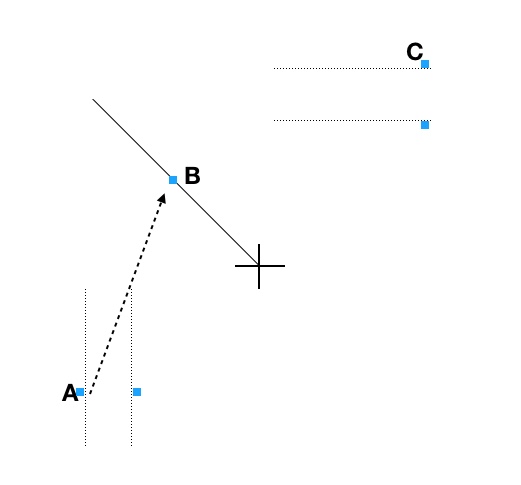
I used to do exactly this. I still have to fight the urge. I would race toward B and slam on the brakes. I’d still be braking hard way past point B where I would turn hard toward C, then apply lots of throttle to get back up to speed. Man, it feels like your really driving! Unfortunately, as dramatic as it is, it is also a very slow technique. This path would look something like what’s shown below in Figure 6.
Frankly, I see a lot of people who are no longer novices making this mistake. Maybe not as egregiously as I did for much too long, but not getting it completely right either. It can be quite difficult to fully recognize the fast from slow lines on autocross courses, especially courses designed intentionally to give the drivers the ability to hang themselves if they really want to. I continue to struggle with determining the correct trade-off between carrying the most possible speed through a corner and sacrificing a little of that speed to better set up for the next feature.
Why is the line shown in Figure 6 slow? While you initially get to B very quickly, you must over-slow the car in order to negotiate what will be a small radius turn after B, followed by using mostly just the engine to accelerate in the new direction beyond C. What you have failed to do is maximize the use of the much greater lateral acceleration capability of the tires to get turned from the initial direction at A to the new direction beyond C. The tires on my Corvette can push me toward C at 1.2Gs just by turning the steering wheel. Feakin’ 200 tread-wear street tires on a Street-class car produce 1.2Gs! The engine can only push me at about 0.45Gs in 2nd gear. Using the tires’ multi-tasking capability for longer and not braking so much will win every time in any car that has a similar difference between tire capability and engine capability. If this is not clear to you I covered this point in more detail recently in this post.
OK, so we can’t massively use the lack of a track edge prior to B to get faster. Is there a way to use the lack of a track edge after point B to get faster? We could take a path something like what’s shown in figure 7, below. Would that help?
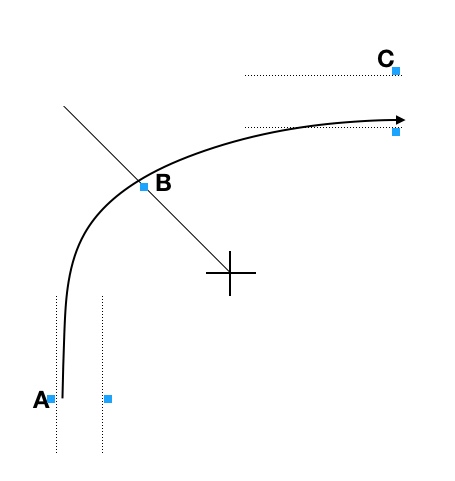
What we’ve done now is to brake more prior to point B so that we can execute a smaller radius arc that ends at B after which we add throttle. The problem is that this will be slower than our original line also. We don’t take full advantage of the track width that’s available which in turn means we used the brakes too much and the lateral ability of the tires too little.
Ah, but some of you are seeing a utility to this line, aren’t you? If we need to be at the location of the arrow on the end of the path shown in Figure 7, at the lower boundary of the gate at C instead of the upper boundary, to be best positioned for the next feature, then we will use exactly a line like this. And some autocross people will call this late apexing. But, it’s not really the same as what we previously drew as a late apex line on a track with edges in Figure 2, is it? In track driving the key component of a late apex is the fact that the position moves around the inner edge of the track and the angle moves with it. In autocross the position of your apex in any feature similar to this is not going to change. It’s going to stay at the cone at B. What will change is the speed and angle at B. So I prefer to not even use the term early or late apex for autocross. Leave those terms for the track environment.
You have to figure out how to drive this feature on the course walk. My method is to stand on the cone at B and look toward the exit at C. I estimate the speed the car will have when arriving at B and decide what the angle of the car needs to be when it passes B, that is, what angle will allow maximum possible throttle-up starting at B and still make the cone at C, or be where I want to be within the gate at C. (The car’s angle at point B is something very easy to recognize, easier than the speed.) This is the definition of optimizing the corner exit. Then I work backwards to determine the line, braking and steering inputs I will need to execute from A to B to arrive at that angle and speed. I don’t call the result either an early apex or a late apex. It’s just the correct apex which really consists of three things: a location, a speed and an angle.
When you drive the course for the first time you probably won’t get it perfect (or anywhere near perfect) so you have to understand how to make the right correction. If you find you can’t deploy all your car’s power after B without hitting the cone at C (equivalent of going off the edge of the race track) then you arrived at too vertical an angle and probably also too fast, i.e. you didn’t slow enough and turn enough before B. So on run 2 you slow a little more and turn a little more between A and B and thus arrive at B at a more horizontal angle and a little slower to allow taking full advantage of all the tire capability and whatever engine power you have after B to reduce time in the corner. This will then optimize the exit as well as the entry specifically for your car (and your car only) within the prevailing conditions. If you’re driving an A-Street C6Z06 Corvette don’t go to your E-Street 1999 Miata buddy and tell him he’s apexing at the wrong angle just because it’s different from you. (Especially if he’s beating you on PAX!) He may be doing it right for his car and it should be different than what you’re doing.
If you arrive at your anticipated point at C but don’t feel you were working the tires to the limit all the way there then you must have arrived at B at too horizontal an angle and too slow. (Full throttle in a straight line does not work the tires to their total capacity even in most four wheel drive cars. Most cars can still turn while accelerating fully.) You correct it by slowing less after A and turning less after A so that you arrive at B faster and more vertical. Then you keep the tires on the limit by continuing to turn (while slowly opening the wheel) while feeding in throttle. In a Miata it may well be full throttle immediately. In a GT350 you’re gonna have to be careful with the right foot!
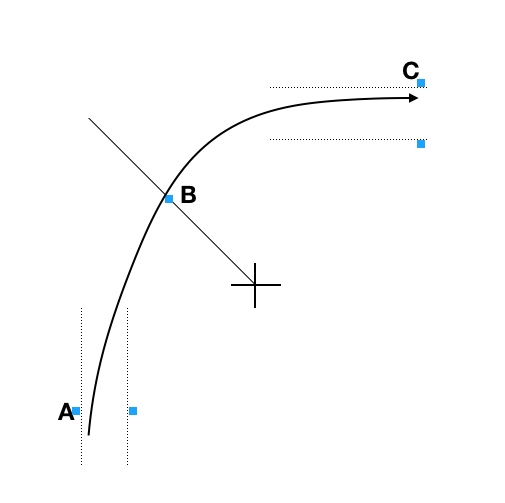
If you’ve applied the corrections then you will arrive at a line that looks something like the one shown in Figure 8, below. Yes, it’s our old Euler spiral, if done correctly. A decreasing, trail-braked radius from A to B and an increasing radius from B to C. Theoretically, the tires are worked to their limit from A to C with combinations of braking-turning (A to B) and accelerating-turning (B to C.)
This line is similar to, but not exactly the same as the late apex line shown in Figure 2 of the previous post. Previously, for a high-power car, we needed the late apex to optimize the exit. Now, for the exact same car, the apex has moved from the previous B’ back down to B and the angle and speed at B change slightly. This new line will probably cross the previous track edge before getting to B. The angle at B will be more vertical since there is a longer distance from B to C during which to complete more of the turn than from B’.
The higher the power to weight ratio, for the same grip level, the more turning has to take place prior to reaching the cone at B. Therefore, the more horizontal the angle will need to be at B in our example. So, in autocross, we don’t make a “later” apex with a more powerful car, i.e. change the location of the apex by moving it around the inside track edge. Instead, we revise two of the three properties of an apex, the angle and speed at the apex location.
We could drive the exact same late-apex line of Figure 2 and it would be almost the same time, but I think it would be slightly slower because it feeds throttle in later and is very slightly longer. We would be some distance off the cone at B which most experienced autocrossers would recognize as a fault. It would not quite optimize the exit that could now start at B instead of B’. If the cone were in fact at B’, instead of at B, then the line from Figure 2 would be correct.
This is not to say that some randomly placed cone in the middle of a corner is always the apex point. Most assuredly this is often not the case. Some cones in the middle of a corner may not even be on the racing line, much less mark the apex! What if there’s no cone at B at all, similar to the case of a 2-cone turnaround discussed in this post? In that case we have to decide where, out in the vastness of space, we will reach our slowest point and decided what speed and angle to be at. All without a good landmark. Ain’t autocross grand?
Now we are ready for the next installment where we’ll present definition 2 for late apexing, the one that I was taught in order to be able to drive track corners safely as a novice, meaning without leaving the pavement! I don’t yet know if it will have any autocross relevance.
