Notice of update: I realized after publication that I’d used an entry speed of 55mph rather than the 50mph used in the previous installment of this series. So, I’ve got back up at 12:30 A.M. and changed it back to 50mph. Didn’t make much difference to the results data and no difference to the conclusions. (I also tried to make Figure 4 less of an eye test.) My apologies to the over 400 of you who have already read this in the first few hours of publication.
I received some good comments on the earlier post “The Really Weird Thing About Modern American Autocross- Part 2”. Charles Krampert, for one, pointed out that I wasn’t taking into account the angle one must drive after leaving the first cone to be set up for the same radius around the next cone. I finally got some time to put that extra turning into the graphics and the spreadsheet. Turns out it makes a significant difference.
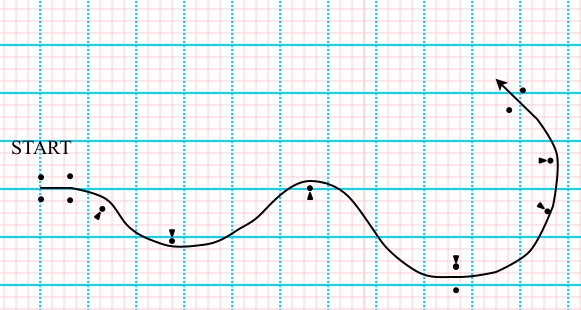
Remember that I’m trying to figure out what radius is fastest around a cone, depending on the acceleration capability of the car. (If you don’t remember, you might want to go back and read the earlier posts.) I assume an infinite procession of cones 150 feet apart which require a nominal 90 degree change of direction around each cone. I also assume 1.2G lateral capability and 1.0G braking, which is typical for many street-class autocross cars. The basic idea is shown in Figure 1, below.

Figure 1
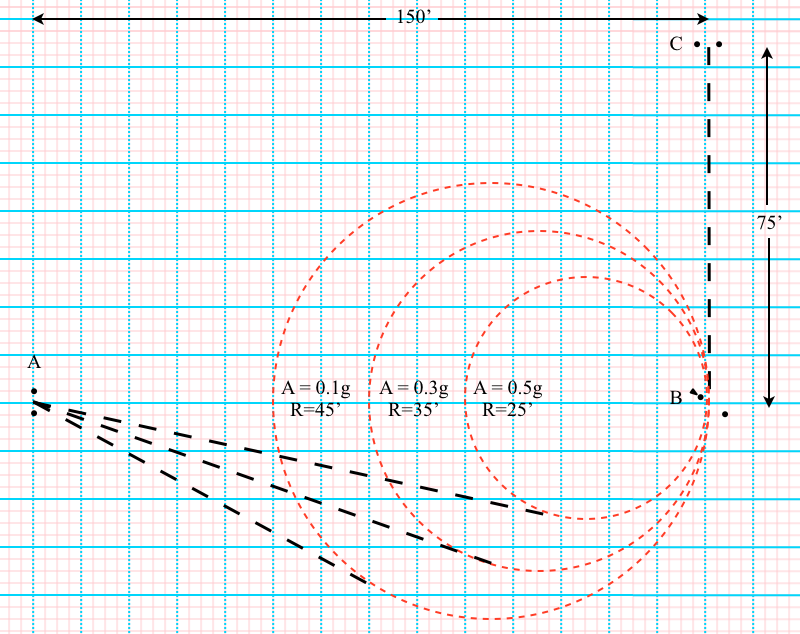
More specifically, Figure 2 shows what I’m analyzing and, in fact, represents the actual fastest radius for a car with 0.3G acceleration capability, namely a radius of 15 feet.
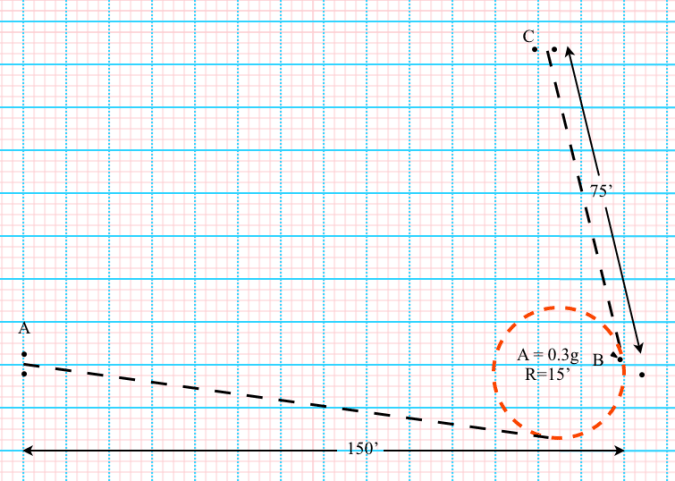
Figure 2
From A to B the car has to take an angle to the outside of B to produce the 15 foot radius. The car then has to go more than 90 degrees in order to exit B to allow it to go around the next cone, 150 feet away (not shown) at the same 15 foot radius. I calculate the time from the start at A, going 50 mph, to the finish at C, 75 feet beyond B.
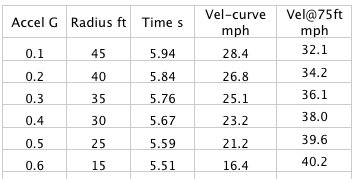
It turns out that considering the extra turning to get to the proper angle for the next cone reduced all the answers. Here are the results, with the old radii results, then the new radii results. The remaining data is all for the new radii.
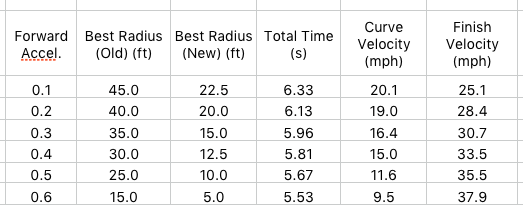
Figure 3
We can make a few observations:
-As before, as the accelerative capability of the car goes up, the best radius goes down. This agrees with what most people think.
-As before, we see an immediate issue with the curve velocities: they are too low for most cars to accelerate strongly from in 2nd gear. More on this below.
-The new best radius values are lower and more compressed over the G range than calculated previously. The extra turning required to be oriented correctly for the next cone greatly penalizes big arcs. A lot of time is lost going around at minimum radius at minimum speed. This goes a long way to answer the doubt I had expressed about the large radius values that the previous analysis showed as best and which I have not seen being used in practice. (I’m a big believer in the idea the most experienced people are doing it mostly right most of the time.) By the same token, if you don’t have to turn the car as much for the next cone you are better off with a somewhat larger radius. The data seems to be very sensitive on this point.
The very low curve velocities associated with very small turning radii mean that there’s a big problem with using this data to make firm conclusions. I began this study thinking that I was using acceleration ranges that were typical of peak torque in 2nd gear. What this has shown is that we can’t think of it that way. The best theoretical radius is always too small. Instead, we have to think of the acceleration that is actually available at the particular curve velocity required by such small radii.
For instance, my BS Corvette can accelerate at 0.45G at peak torque in 2nd gear. But at 25 mph it may struggle to reach 0.3 G. The results chart says the best radius for 0.3G is 15 feet, but my car will only be going 16.4 mph around a 15 foot radius and will really struggle to accelerate in 2nd gear from that low speed.
On the other hand, what this data may be telling me is that I’d be better off taking a smaller radius and downshifting to 1st. I know, this is sacrilege! I’m going to lose roughly 0.2 seconds when I upshift and probably lost some time downshifting as well. Will it ever be worth it to downshift?
Looking at the sensitivity of the results may shed some light. Here is the spreadsheet set for 0.3G in Figure 4, below.
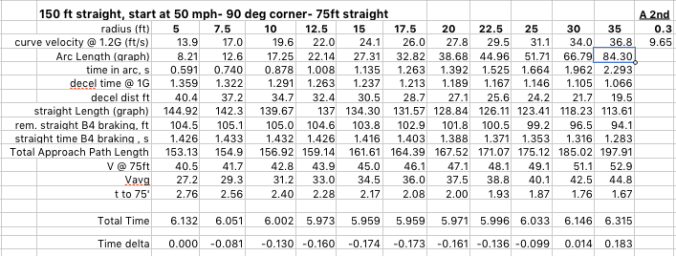
Figure 4
Looking at the Total Time row you can see that the minimum time is 5.959 seconds underneath the 15 foot radius column. That’s how I get that 15 feet is the best radius for a 0.3G car… by comparing it to the results for radii both bigger and smaller. It’s a brute-force optimization technique. (It’s also 5.959 seconds underneath the 17.5 foot column, so the real minimum is somewhere in between. I just chose one.)
If I change the A 2nd acceleration parameter in the upper-right corner all the columns recalculate and I find the minimum time for that G-level. I graphically determine the arc distance and straight length within the columns for each case.
Now, how far off of that best 15 foot radius do I have to get to equal a 0.2 second downshift loss? I’d have to go beyond a 30 foot radius before losing 0.2 seconds. But, the bigger radius I take the less I will need to downshift. If we assume that at a 30 feet radius I definitely don’t need to downshift, then if I choose to take a 15 foot radius and do downshift I am, at best, breaking even. I think this confirms the majority view that downshifting with a relatively slow-shifting car like mine is almost never a good idea. The corner’s gotta be really tight to consider it.
If we consider a motor with really poor low-RPM torque, say an S2000 that will drop out of V-tec, then no way it should take the smaller radius. Unless…
Here’s the real rub and why I entitled this series of blog posts the way I did. For corners where the car is forced by the course design to take a very tight radius S2000 drivers have learned that it is better to downshift to first when I would not in my Corvette. At least that has been my observation after competing against them the last few years. They “know” that they lose too much trying to get off a slow corner in 2nd. (When I see an S2000 struggling to accelerate below the V-tec RPM switch it just warms my heart!) I think we all know that there is some point that we should shift to first gear if the corner is very tight.
Let’s level set and get our bearings. When do we know that it is definitely advantageous to downshift? Pin cones. All of us who have done 180-degree pin cones know that the best way to take them is absolutely as tight as possible and downshift to 1st by all means. (Thank you, Randall Wilcox.) We never see these at National events, but they had one at every event in Nashville at the Superspeedway lot that I ever attended and we have them quite often in Huntsville when we run at the old airport. I’ve done a lot of those suckers.
Alternatively, when do know we would never downshift? How about a 45 degree turn? No way we would downshift to first. We all know that we cannot even create a radius small enough to force the car so slow to even think about downshifting.
So, somewhere between 180 degrees of turn and 45 degrees of turn is a middle ground where it may or may not pay to downshift from 2nd gear at autocross speeds. We happen to be concerned here with 90 degrees and somewhat more, so we are probably right in the no-man’s land.
Of course, there’s another issue with downshifting. Can you get the power down? If you can’t get enough power down to create the fantastic acceleration promised by 1st gear, no point in downshifting. Also, as soon as the rear end steps out you’ve lost 0.2 seconds, or more.
All this implies that, in certain situations, the right radius for a car on R-comps is not the same as the right radius for a car on street tires. It also means that as tires get better at putting down power, as we saw with the Bridgestone RE71R last year, it may affect the proper radius. Yes, autocross is complicated.
What about dual-clutch transmissions? What if you can downshift and get 0.7G in 1st gear even in a relatively low-powered car and then lose next to nothing when you upshift to second? I think this data says that for large degree turns you should consider braking down to a very small radius and downshift, within the limits of you car’s ability to put power down. You might even alter your whole style of taking large-degree corners in order to use the quick-shift capability.