The really weird and wonderful thing about Modern American Autocross, particularly as opposed to road-racing, and to a greater extent than Rallycross, is that often the driver must decide where the track is and what path to take. This seems to take a peculiar type of brain-power, or at least gobs of experience, in addition to driving skill.
I’ve talked about having to choose the track and path in one of my early posts titled No Corners, No Straights. Now I’m going to try to use a little brain-power to analyze the question: what radius to take around an offset cone?
It’s also true that the drivers in American autocross are themselves pretty weird, and pretty wonderful. By and large the srsbsns autocrossers are fantastically friendly and helpful to the others coming up in the sport and they share a very strong, fiendishly intelligent camaraderie with each other. This sets a certain tone of friendly challenge where the most common thing is four guys in the same class donate parts, grab tools and pitch in to repair a competitor’s broken car in grid just so they can beat him! A lot has to do with the amateur nature of the sport and the type of folks it attracts. Some people think it strange that we race for a $3.50 trophy, or maybe a Tee-shirt, but they are missing something important. A lot of the sport’s amateur charm is only possible because there is no large monetary prize at stake.
Of course not everyone in the sport is so cool all the time. For example, I see a clear difference between the srsbsns autocrossers, who I define as those with a burning desire to get to the top echelon of the sport, whether they are there yet or not, and the business-serious drivers. Some of the bad-feeling controversies of late in the sport seem to me fueled by the latter. Not exclusively, by any means, and certainly not in every case. (Those fiendishly intelligent racers are often very quick to tell each other when they are being stupid.) But, by business-serious I mean those that have somehow contrived to make a living in a manner connected to autocross. They used to be just srsbsns racers, but now have a significant monetary stake in what happens so have become business-serious as well. That always skews things, both for individuals and for institutions. (Witness big-time college football.) But, I digress.
I’m going to go out on a limb and assume that historically there has been a movement within American autocross course design. (I could be wrong about this historical movement, but you’ll get my point just the same.) The movement I’m thinking about has been along a continuum from “specified-track” course design to “unspecified-track” course design. Most of us have seen what I call a “specified-track” design one time or another, or at least as a section of a course. This is where two lines of cones are set out to create what looks like the borders of a road-course, like this:

“Specified-Track” Course Design
In a specified-track course, the width of the course is more-or-less constant and there is little choice of line. There are a few clubs around that still do this, but not many. The majority in the sport have moved on to a more challenging type of course design and use specified-track components sparingly, maybe for safety purposes or for variety.
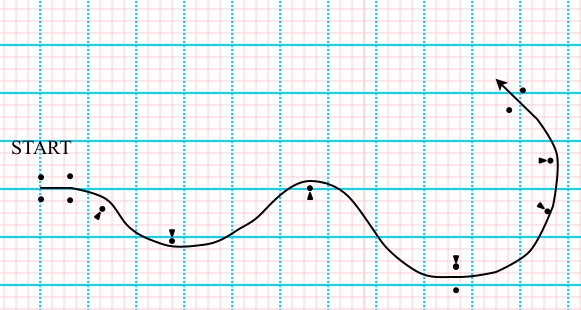
In unspecified-track course design the cones may be few and far between so the choices of path become almost infinite. The driver must decide what line to take based on either knowledge, experience or both. Here’s the same course as above, but with less of a specified track:

Unspecified-Track Course Design
Say you are running the course above. As you approach the pointed cone in the very middle and have to turn right, what radius do you take around it? Assume it’s a 90 degree angle from approach to departure. Unlike the way it’s drawn above, most people would say, first of all, that you should get the turning done by the time you pass the cone. That makes the cone the exit of the “corner”, not the apex, allowing you to accelerate early down to the gate at the lower right.
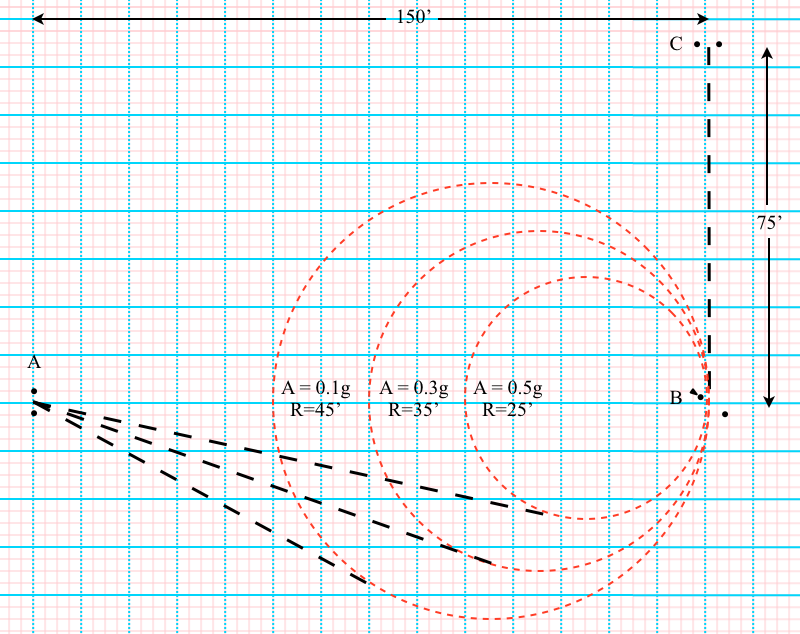
Here’s the situation I’ve created in order to analyze this question, except I have you turning 90 degrees left around a pointer cone & gate:

3 Possible Paths from A to C Around Gate at B
Imagine you are in your car at A. You have the choice to take the small 10′ radius turn, the medium 25′ radius turn, the big 50′ radius turn or anything in-between. Which path is best? How wide do you take the corner if there is no specified track width to create a limit?
It is commonly believed that the proper path and corner radius is influenced by the acceleration capability of the car. Dennis Grant was a strong proponent of this school of thought. (See his Far North Racing website, the Autocross To Win section.) In a car with a high power-to-weight ratio that can also get the power down (think Super Street Modified, for example) it is believed you should tend to “drive diamonds” which means tight radii around the cones. In an H-Street econobox that can’t get out of it’s own way you should “maintain momentum” and take a wider arc, so they say. I wanted to see if I could prove the truth of this and get a feel for how much it matters. I’ve never seen such a proof in a book or anywhere on-line. I’m sure there’s a simulator out there that could crank this out in an instant, but I don’t have access to one. I’ve worked the problem out with a combination of spreadsheet and graphics. I’ve set it up like this:
-At A all cars are traveling 50 mph and automatically orient toward the chosen radius. They continue at this speed until they must brake for the turn. All cars brake the same (1.0g) and corner the same (1.2g). This is not quite true across the autocross classes (the classes with aero and slicks corner much harder, for instance) but it’s a simplification I had to make.
-Each car brakes at 1g in a straight line until it hits the tangent of the chosen radius. So, a big radius means you have to brake earlier, reducing the time spent at 50 mph. But, a big radius also means you brake less and later because the speed in the curve will be higher, which means you are going faster at B when you hit the gas again. A big radius also means the car will travel a longer path. See how complicated this is?
-The car then travels around the chosen radius at a constant speed dictated by 1.2 g cornering capability. Again, the bigger the radius, the faster the speed and the longer the path.
-At B each car accelerates at it’s capability, from the constant cornering speed dictated by the radius, in a straight line for 75 feet.
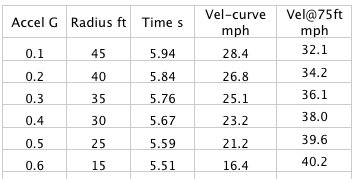
-I calculate the total elapsed time from A to C for cars with 2nd gear acceleration capability from .1g (maybe an HS econobox) to .6g, maybe an STU Corvette, for radii that vary from 5 feet to 55 feet.
Results in the next post!