
From time to time people ask me things like: “Why do you give away all this stuff you figure out to the competition? Maybe you should keep it within our autocross group.”
First of all, half of this stuff is probably rubbish, in which case I’m not doing my competition any favors, assuming they read these blog posts. Secondly, my writing isn’t always perfectly clear. Sometimes I mislead people even when I’m not trying to, so that could be a competitive advantage! Thirdly, I admire the people who make the effort to figure things out and I feel good if I can help them. Sometimes they return the favor. Fourthly, I have to write it all down anyway. It’s part of the process.
After writing it then I’d have to make the decision to just sit on it if I wanted to keep it secret. Maybe if I was younger I’d do that. But, I’m not and I don’t. I think I need to know that other people are going to read it and think either “What a fool!” or “Maybe he’s got something there.” That peer pressure is good for the quality of my thinking and the quality of the product.
OK. For a long time I’ve been trying to figure out the answers to some questions that relate to shock absorbers. (I’m not going to call them dampers.) Questions like these:
- Can we figure out how stiff they should be for a given car?
- Should the characteristic damping curves be linear, single-digressive, or double-digressive? (And now we can have regressive curves too!) If you don’t know what those terms mean, better google them.
- Should the damping be symmetric or asymmetric, i.e. equal rebound and compression forces or skewed one way or the other?
Now I have a confession to make: I don’t have all the answers. I’m writing this after several years of off-and-on research into these questions. I think I have a few answers or at least it seems like I’m getting close. The fact that I’m helping set-up a Street Prepared-class car that I plan to be driving next year has spurred me into a renewed emphasis on finding firm answers to these questions.* Another confession: the rear springs were changed and the shocks have already been revalved per my suggestions on the car I’ll be driving. If, by the end of this series of blog posts, I figure out that I was wrong then I may have to pay to have the shocks revalved again!
Why Have Shocks?
It occurs to me that maybe I need to answer the question above. The quick (and true) answer is we have shocks because we have springs.
Actually, we have two major types of springs within the suspension system. The first type are those coiled pieces of metal. (Or flat fiberglass beams if you drive certain models of Corvette.) The second type are what used to be called “balloon” tires to differentiate them from the hard rubber that preceded the modern tire.
We can’t do much about the tires and usually don’t need to. The tires are so stiff that their natural frequency is too high to affect the other two masses, the sprung and unsprung ones, and too high to be damped by the shocks in any case. High-frequency tire vibrations go straight through the shocks and coil spring to the chassis. It only takes a bit of elastomer in the mounts to block them, however.
Only when the natural frequency of the sprung mass, via super-stiff springs, becomes similar to the tire’s own natural frequency does the spring rate of the tires become a significant problem. Think Formula 1 and inerters. (If you don’t know what an inerter is, you can google that as well. As my wife constantly reminds me, Google is your friend.)
The existence of the springs divides the car’s mass into two parts, the unsprung and the sprung, and each have their own natural frequencies which are relatively low (approximately 1.5Hz and 8Hz, respectively, for a sporty car) and are definite problems. Each mass will vibrate and, left unchecked, resonate (amplify) at its own natural frequency, if excited at that natural frequency by either the imperfect surface or the driver’s actions. Resonance can cause loss of grip and/or loss of control. (We won’t mention ride quality. We don’t care about that.) A single strike at the tire that causes the correct velocity in either the sprung or unsprung masses can start a resonance… it doesn’t require repeated inputs like ripples in the pavement. But there are differences in results. (Single sharp inputs are handled by a different department in the world of Shock and Vibration, the Transient Response department.) In any case, whether caused by a repeating (harmonic) input or a single whack, the primary job of the shock absorbers is to stop any resonances in their tracks, even though this is unknown to most people and rarely discussed by racers. Providing good grip, body control and transient response are important, but secondary considerations. Luckily, in almost all situations, we get enough damping at the important frequencies to control resonance while we are pursuing the secondary considerations.
Understanding the surface on which we race
As autocrossers, I think we are uniquely interested in grip on less than perfect surfaces, i.e. surfaces that are generally much worse than typical race tracks and often even worse than city streets. We are mostly concerned with moderately bumpy asphalt parking lots and less bumpy airport concrete surfaces that are typically criss-crossed by expansion and water runoff joints. These joints can be quite sharp though the elevation changes are relatively small. In addition, either of these surface types can sometimes contain a significant solitary bump or dip right on the driving line. Sometimes these bumps are located where the car is driving on the cornering limit, with the suspension on one side significantly compressed. It’s also possible that these significant imperfections in the surface occur just as the car is in the middle of a transient maneuver, such as in the middle of a chicane. (Our courses are chock-full of chicanes, some that we create ourselves, on purpose, and don’t appear on the course map.) Occasionally we compete on more perfect asphalt or concrete surfaces, but we can’t count on it.
I think we need to carefully consider the differences between these surfaces we compete on and 1) race tracks, which are generally quite a bit smoother (yes, I know there are exceptions) and 2) the much wider variety of surfaces and conditions for which the typical passenger car must be designed, such as gravel or dirt.
Though the stock passenger car design has to negotiate a wider range of conditions than the same cars when autocrossing, including bigger bumps and potholes, they are not expected to be cornering or transitioning at the limit at the time. By and large the driver of a passenger car is expected by the legal authorities and insurance companies to reduce speed as necessary to maintain an appropriate safety margin at all times. Anything less is considered reckless driving. Autocrossers don’t operate in this manner. We take essentially those same cars and drive them, shall we say, inappropriately. We even race them in the rain, sometimes through deep standing water!
Speaking of transitions, that’s another key differentiator. We have these things called slaloms. And Chicago boxes. And thread-the-needle features. No other form of automotive sport places such high emphasis on transitional capability.
Because of these surface and usage differences I think there are some things we need to be careful about as we proceed:
- We need to be wary of slavishly copying the set up strategies of road-racers, even if your car really is a road-race car. Lots to learn there, but…
- We need to be very careful of our own tribal knowledge, given the vast ability of humans to quickly adapt to situations, to not know what they are actually doing, or to not be able to accurately describe what they’re doing or who have completely nutty ideas about why they are successful. Then there are the vagaries of luck and skill that can see someone win a championship in spite of a poorly setup car, or win because a particular course design suited a particular car or driver by accident.
- When considering the conclusions of academics who study things like shock damping on cars or trucks we need to remember that 1) probably no single group on the face of the planet has a more difficult time seeing the forest for the trees, and 2) academics tend to look for their house-key under the streetlamp even though they dropped it on the dark porch, i.e. they use the tools available even if such tools are not up to the task. Sometimes this is called the when you’re wielding a hammer everything looks like a nail syndrome.
Venu Muluka
Now that I’ve pissed off academics everywhere let’s start with one who wrote a paper I admire. His name is Venu Muluka and his thesis at Concordia University in Montreal was entitled Optimal Suspension Damping and Axle Vibration Absorber For Reduction Of Dynamic Tire Loads way back in 1998.
Muluka was primarily interested in how to save highways from being destroyed by heavy trucks. He focused on the loads the tires impart to the pavement, both the peak magnitudes and the fatigue loads and how those loads can be lessened by better shock absorber damping. Even though he wasn’t writing a thesis on race-car grip, he developed information that’s relevant to us, I believe. If you can learn how to use the shocks to reduce tire load variation then you’ve learned a way to increase average grip as well. At least, that’s a theory to which many who study race-car dynamics subscribe.
Muluka based his study on big trucks, but the ones with standard suspensions are similar to most cars in that they have similarly low natural frequencies in bounce, pitch and roll of the sprung mass and somewhat higher natural frequencies for the unsprung mass. Muluka also studied other types of suspensions that are found on trucks such as walking beam, hysteretic leaf springs (when leafs are designed to rub against each other with high friction to produce damping) and air springs, but we won’t be worrying about those.
First Muluka uses a typical quarter-car model. His full model is shown in Figure 1, below, (his figure 2.3) but for this first part he uses only one side, which, when using the appropriate values for mass, etc. is called a quarter-car model. (I love that he hand-drew his figures! So 1998!)
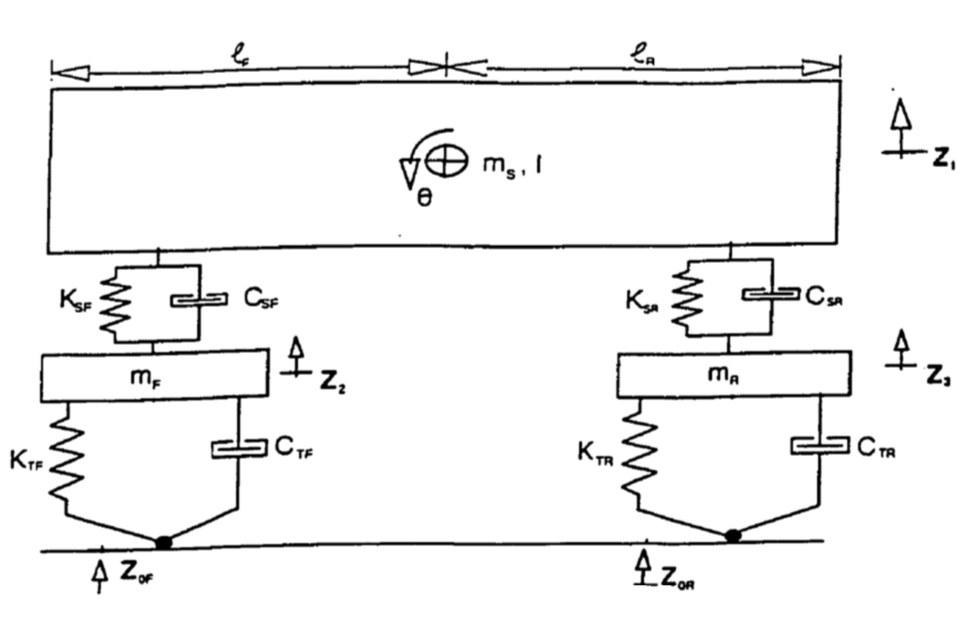
Starting from the top, the big rectangle represents the sprung mass of the vehicle and how it can translate vertically and rotate in pitch. Ksf is the main suspension coil spring (either just one or both fronts together) where K stands for the spring rate. Csf is the shock absorber parallel with the coil spring where C stands for the damping rate. The Mf is the unsprung mass of the front tires, wheels, axles, etc. Ktf and Ctf are the spring rate and damping rate of the front tires. Ctf is very small and is almost universally ignored, but not by Muluka. This guy kept it in his math, at least as far as I can tell by inspection of the equations he develops that represent the model. The Z’s at the bottom are the input displacements from the roads, i.e. bumps and holes. He uses mathematical forcing functions for the Zs that represent smooth, moderate and rough roads, specifically the roads in his area of Canada. Someone else had already collected that data.
Muluka then creates shock absorber models that are more sophisticated than most studies I’ve read. When he looked at typical truck shocks he found that they were 1) asymmetric, i.e. had different values for compression and rebound, and 2) had blowoff valves on the rebound side. Such shocks have characteristic curves as shown below in Figure 2 (his Figure 2.13).
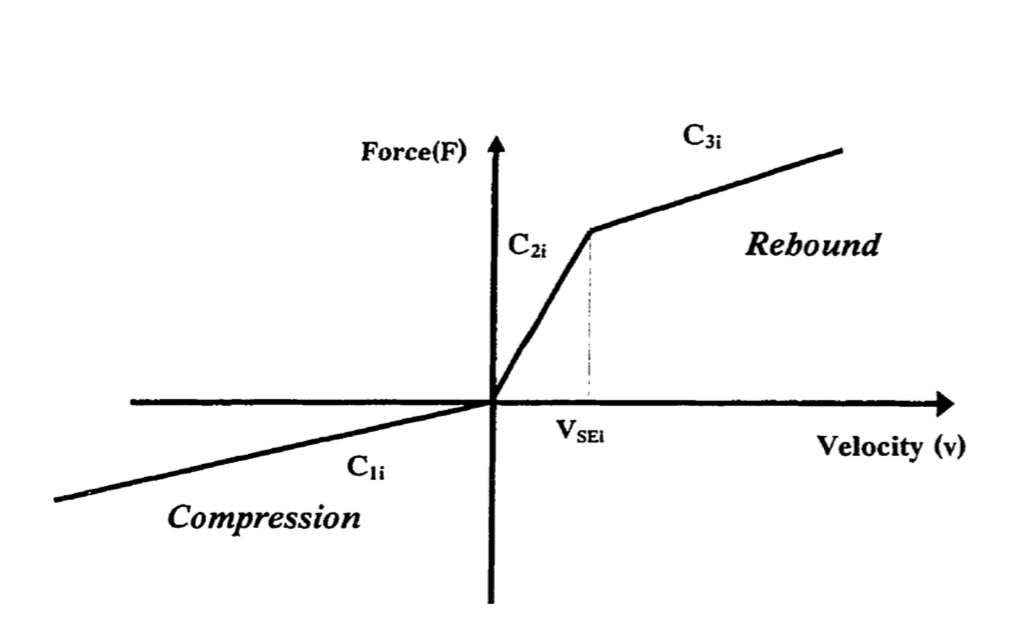
In Figure 2 note that the rebound is shown as positive, the opposite of what we normally see in shock dyno charts. (This is typical of many analytic treatments… the sign convention is opposite.) Also, we usually see the negative side of the graph folded over in an over/under manner, but academic papers rarely do that.
This figure throws us right into several of our questions. It has linear compression and digressive rebound with asymmetry. Cool!
Muluka’s Results
Muluka begins with symmetric linear damping in his quarter-car model, i.e. equal compression and rebound with no knees in the curves, and then later gets more complicated. With symmetric and linear damping he found that a damping ratio of only 10% had a huge effect on the Dynamic Load Coefficient (DLC) as compared to none. DLC is a measure of load variation at the tire. Muluka was interested in saving the pavement while we are interested in maximizing grip, but all the studies show that they tend to go hand in hand so we’re going to assume that DLC is a proxy for grip.
Muluka found that 25% to 30% of critical damping produced the best (minimum) DLC as shown in Figure 3 below, which is his Figure 4.2.
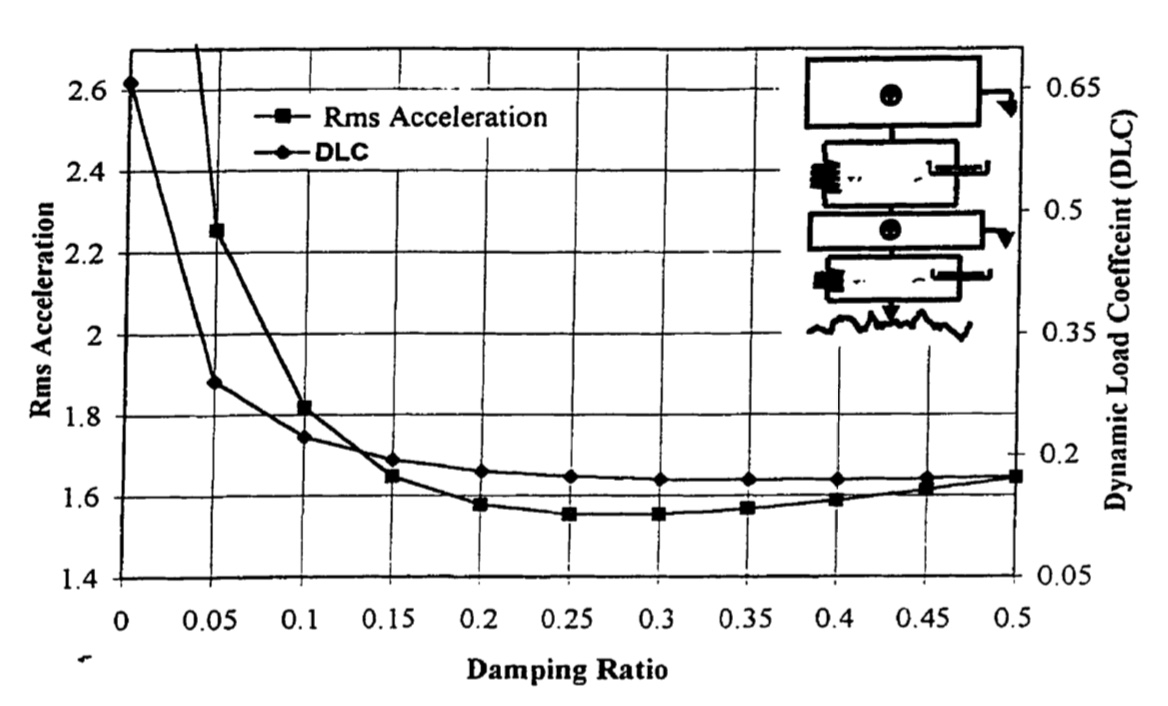
Increasing the damping above 25% doesn’t improve things though the DLC doesn’t get much worse either. Remember, this is symmetric and linear damping. No digression, regression, progression and no blowoff. He only goes up to 50%, but the trend indicates to me that even at much higher values, 60%, 70%, 80%, which we may want to use for transient response reasons, the theoretical loss of grip is minor.
Then comes one of the most interesting charts in his entire study from our standpoint. In his Figure 4.3 which I have reproduced below as my Figure 4, Muluka varied the ratio of rebound to compression damping from 1:1 to 9:1, that is, up to 9 times more rebound than compression.
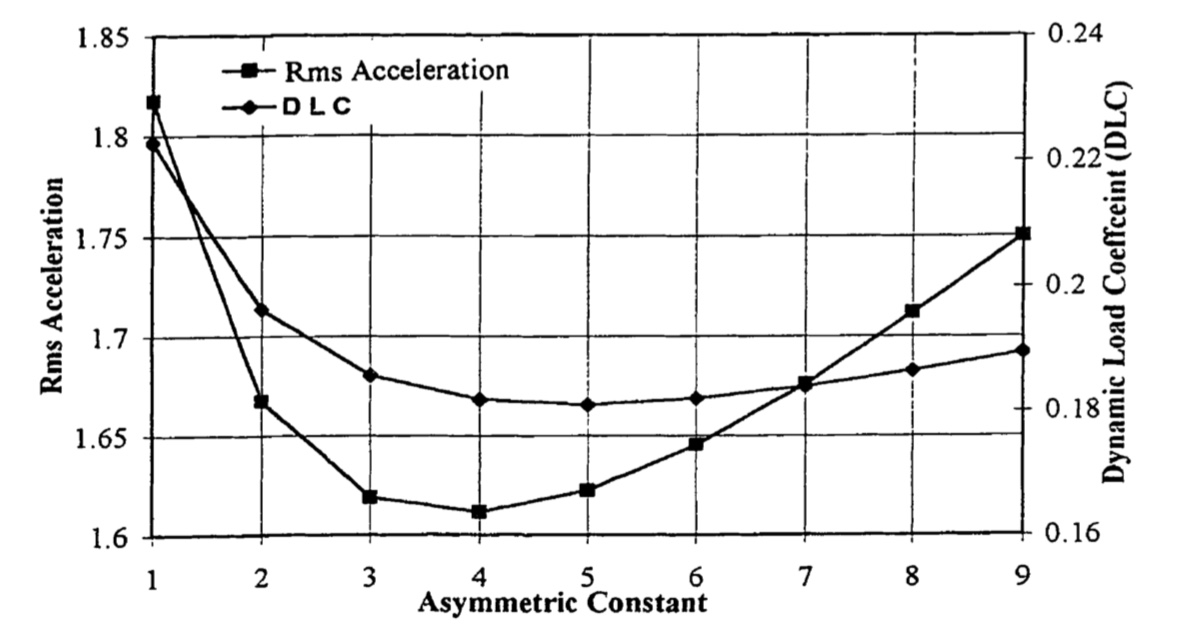
He found that the best (lowest) DLC values came for a ratio of 5:1, i.e. five times as much rebound as compression. The best ride, as represented by Rms Acceleration, was at 4:1. (RMS stands for Root Mean Square…sort of an average value.)
AFAIK, this is the earliest published analytical result supporting the widely used practice of weighting towards high rebound and low compression which was the nearly universal damping characteristic used since the dawn of the automobile. This provides a rational answer to Dixon’s question about asymmetric damping in the automotive industry I talked about in Part 1. Apparently Dixon, even in his 2006 2nd edition of The Shock Absorber Handbook, didn’t know about this result in Muluka’s thesis from eight years before. Since then there have been numerous studies which confirm Muluka’s results, i.e. more rebound than compression produces a better ride and better grip.
Does this mean we want 4X as much rebound damping as compression damping on our autocross car? No it does not. We must be careful not to jump to conclusions. I have a friend who received a set of expensive shocks that had 4X the rebound as compression. They were absolutely horrible, probably because the gross amount of damping was too high. The car may also have been jacking down terribly onto the bumpstops.
Can we ask why this result is what it is? You can ask, but that’s outside the scope of Muluka’s thesis. When you simulate with a model you get certain results. The question of why is separate. Not unimportant, but a separate consideration. It’s left to us to figure out the why, where the results might apply and whether the model is actually good enough to pay attention to in the first place. None of these questions have easy answers.
Next Muluka investigates optimizing asymmetric and non-linear shock damping. The result is very interesting.
He reverts to his more complicated full model shown in Figure 1. He uses the full shock characteristic curve as shown in Figure 2 where the rebound blows off at a certain shaft velocity. He investigates compression damping values that range from 5% to 20% of critical, which is low by our autocross standards, unfortunately. He looks at results at 80kph (49.7mph), 100kph (62.1mph) and 120kph (74.6mph) on a smooth road and a rough road. I will focus on the lower speed of about 50mph and the smooth road results. He finds the optimum rebound damping and blow-off velocity for each compression level.
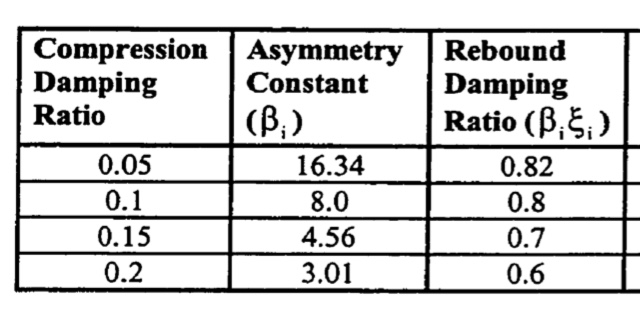
The results were that as compression damping rises rebound damping needs to drop or the DLC gets worse. When compression was only 5% the best value for rebound was a whopping 82% and no blowoff helped. After that the best rebound value moved linearly down as compression went up and you needed to blow off the rebound at a certain velocity. With 20% compression damping, rebound damping was best at only 60%. (The mean damping was about 45% of critical for best results.) These results are shown in Figure 5, which is reproduced from a portion of his Figure 4.1.
This inverse relationship between compression and rebound values may explain why very different shock valving strategies can produce similar results. In this study 10%/80% asymmetry produced the same results as a 20%/60% asymmetry. I can only expect that raising the compression damping further, as we do in autocross, would require additional decreases in rebound to prevent hurting DLC and thus grip. For instance, we may want much higher compression damping than would ever be considered on a passenger car or big truck for other reasons, such as in the pursuit of better transient response. I think what this does tell us is that as we increase compression damping ratios above 20% then we’ll probably find that we must decrease the ratio between rebound to compression even further than the 3:1 ratio Muluka ends at or we are likely to start losing grip. I note that Dennis Grant’s calculator produces an approximate ratio of 2:1 at recommended total damping levels of 65% of critical (bump and rebound combined) and that for FSAE cars KAZ Technologies recommends shocks with 50% more compression than rebound, flipping traditional damping asymmetry on it’s head. KAZ Tech also recommends a damping ratio of as much as 400% of critical, but only at extremely low shaft velocities. (They are double-digressive.) At higher velocities they reduce to less than critical. However, those shock characteristics appear to be intended for an FSAE car that also has a very different, non-traditional setup.
So, be careful and don’t take the numbers literally. This is not a model of your autocross car. What I’m attempting to take away from this are trends and basic truths, not specific values.
Finally, Muluka investigates a comparison of linear but still asymmetric shocks, i.e. shocks with no rebound blowoff, vs. his optimal damper with rebound blowoff as shown above in Figure 2. He shows that the optimal damper with rebound blowoff, at 50mph on a smooth road, reduces the DLC at the front by 30% and 21% at the rear compared to a linear damper. The effect is not quite so large on a rough road at low speed, but reverses at high speed. At high speed blowing off the rebound provided best results on a rough road and wasn’t quite so important on a smooth road.
My takeaway is that this last investigation indicates that no matter the level of bumpiness it is best to blow-off (digress) rebound damping at some particular shaft speed for best grip. If we assume that we’re going to digress the compression as well (not studied by Mukula but common in autocross) then this argues for a double-digressive shock characteristic.
This makes me feel good about convincing the owner of the car I’ll be driving next year to invest in double-digressive pistons!
More to come, I think.
*Update: We invested in double-digressive pistons and had them valved to a specification I wrote, using Dennis Grant’s on-line calculator. The car was so good at every event (on various surfaces) that we were never tempted to turn one of the adjusters. I trophied in the car at the first national tour event we attended, on a very bumpy surface, but the engine blew up soon after. That was that.
